라즈베리 파이 피코 조이스틱 서보 모터
이 가이드는 라즈베리 파이 피코와 조이스틱을 사용하여 두 개의 서보 모터 또는 팬틸트 키트를 제어하는 방법을 보여줍니다.
조이스틱에는 X축과 Y축이라고 불리는 크로스 패턴으로 배치된 두 개의 포텐셔미터라는 제어 부품이 있습니다. 이 포텐셔미터는 조이스틱의 VRX 및 VRY 핀에서 출력되는 X값과 Y값으로 알려진 신호를 생성합니다. 우리는 이 신호들을 사용하여 두 개의 서보 모터를 작동시키는데, X값은 서보 모터 #1을 제어하고 Y값은 서보 모터 #2를 제어합니다. 팬틸트 킷과 함께 사용될 때, 이 두 서보 모터는 3차원으로 움직이기 위해 협력합니다.
애플리케이션은 두 가지 방법으로 사용할 수 있습니다:
- 사용 사례 1: 조이스틱을 움직이면 서보 모터가 제어됩니다:
서보 모터의 움직임 각도는 조이스틱의 좌우 (X) 및 상하 (Y) 움직임에 해당합니다.
- 조이스틱을 놓으면, 조이스틱과 서보 모터는 초기 위치로 돌아갑니다.
- 사용 사례 2: 조이스틱을 사용하여 서보 모터를 제어하세요:
조이스틱을 왼쪽으로 움직이면 서보 모터 #1이 시계 방향으로 회전합니다.
조이스틱을 오른쪽으로 움직이면 서보 모터 #1이 반시계 방향으로 회전합니다.
조이스틱을 위로 움직이면 서보 모터 #2가 시계 방향으로 회전합니다.
조이스틱을 아래로 움직이면 서보 모터 #2가 반시계 방향으로 회전합니다.
조이스틱을 놓아도 서보 모터의 위치는 바뀌지 않습니다.
조이스틱의 버튼을 누르면 서보 모터가 중앙으로 재설정됩니다.
준비물
| 1 | × | 라즈베리 파이 피코 W | 쿠팡 | 아마존 | |
| 1 | × | 라즈베리 파이 피코 (또는) | 쿠팡 | 아마존 | |
| 1 | × | 마이크로 USB 케이블 | 아마존 | |
| 1 | × | 조이스틱 (Joystick) | 쿠팡 | 아마존 | |
| 2 | × | 서보 모터 | 쿠팡 | 아마존 | |
| 2 | × | (추천) 서보 모터가 포함된 팬 틸트 키트 | 아마존 | |
| 1 | × | 점퍼케이블 | 쿠팡 | 아마존 | |
| 1 | × | (추천) 라즈베리 파이 피코용 스크루 터미널 확장 보드 | 아마존 |
조이스틱 및 서보 모터에 대하여
조이스틱과 서보 모터의 핀 배치, 기능, 프로그래밍 방법 등 상세 정보에 대해 잘 모르신다면, 이 튜토리얼들을 참고하여 더 자세히 알아보세요.
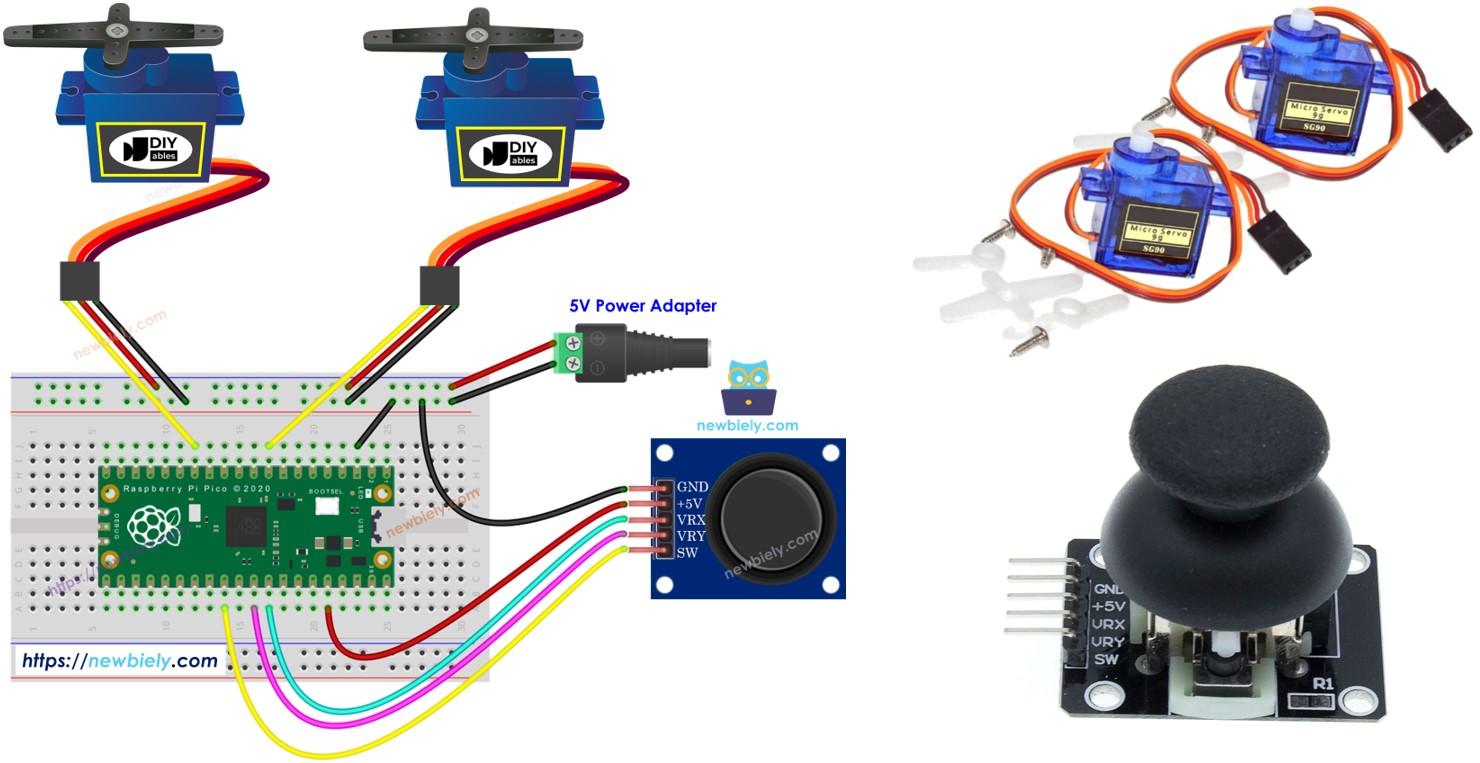
선연결
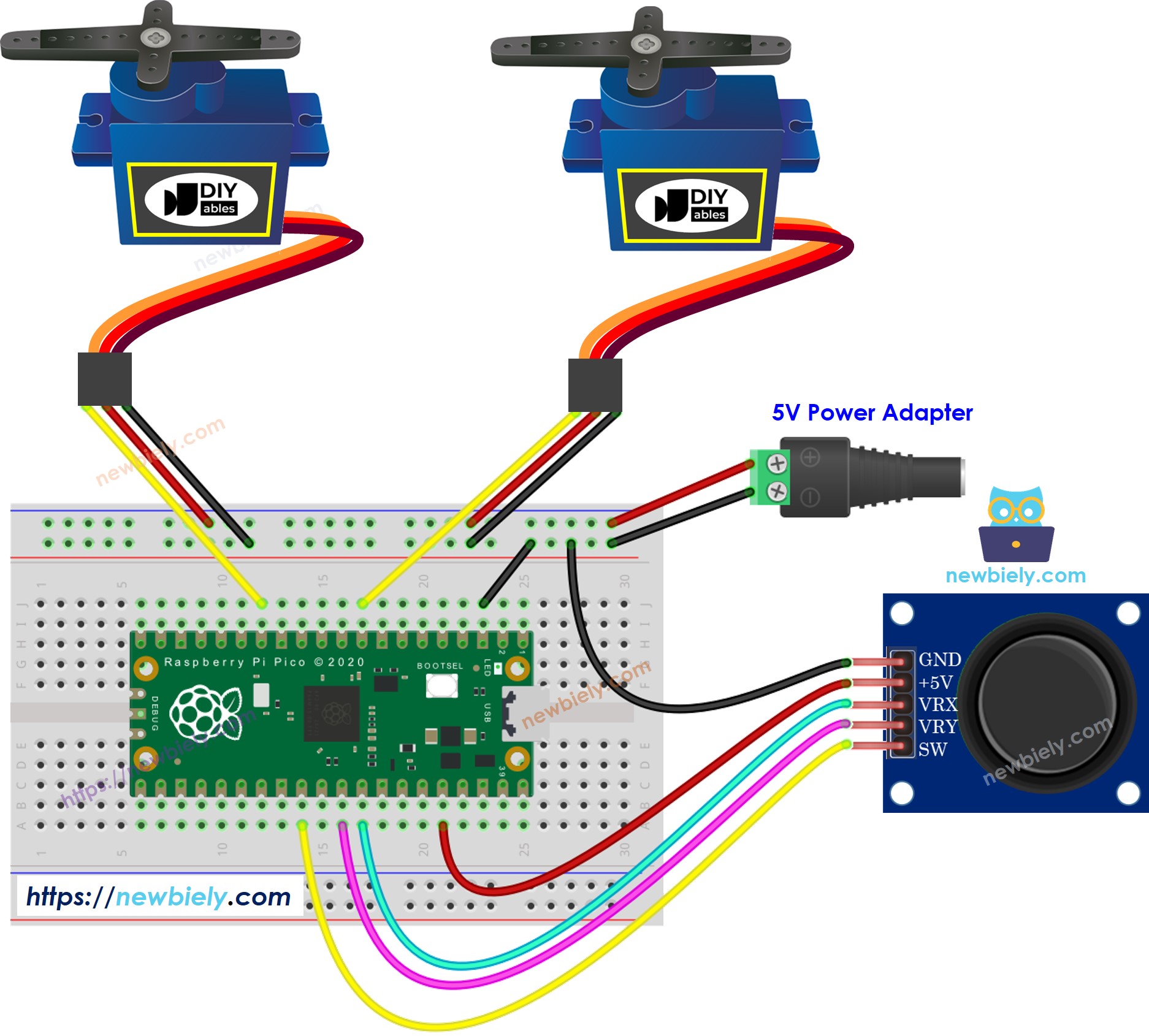
이 이미지는 Fritzing을 사용하여 만들어졌습니다. 이미지를 확대하려면 클릭하세요.
라즈베리 파이 피코 코드
라즈베리 파이 피코 코드 - 조이스틱 엄지의 움직임에 따라 서보 모터가 회전합니다.
자세한 사용 방법
아래의 지침을 단계별로 따라주세요:
- 컴퓨터에 Thonny IDE가 설치되어 있는지 확인하세요.
- Raspberry Pi Pico에 MicroPython 펌웨어가 설치되어 있는지 확인하세요.
- 만약 처음으로 Raspberry Pico를 사용하신다면, 자세한 내용은 라즈베리 파이 피코 - 시작하기 튜토리얼을 참조하세요.
- 제공된 다이어그램에 따라 Raspberry Pi Pico를 조이스틱과 서보 모터에 연결하세요.
- USB 케이블을 사용하여 Raspberry Pi Pico를 컴퓨터에 연결하세요.
- 컴퓨터에서 Thonny IDE를 실행하세요.
- Thonny IDE에서 도구 옵션으로 이동해 MicroPython (Raspberry Pi Pico) 인터프리터를 선택하세요.
- 인터프리터 탭에서 드롭다운 메뉴에서 MicroPython (Raspberry Pi Pico)를 선택하세요.
- 올바른 포트가 선택되었는지 확인하세요. Thonny IDE는 포트를 자동으로 감지해야 하지만, 수동으로 선택해야 할 수도 있습니다 (예: Windows에서는 COM3, Linux에서는 /dev/ttyACM0).
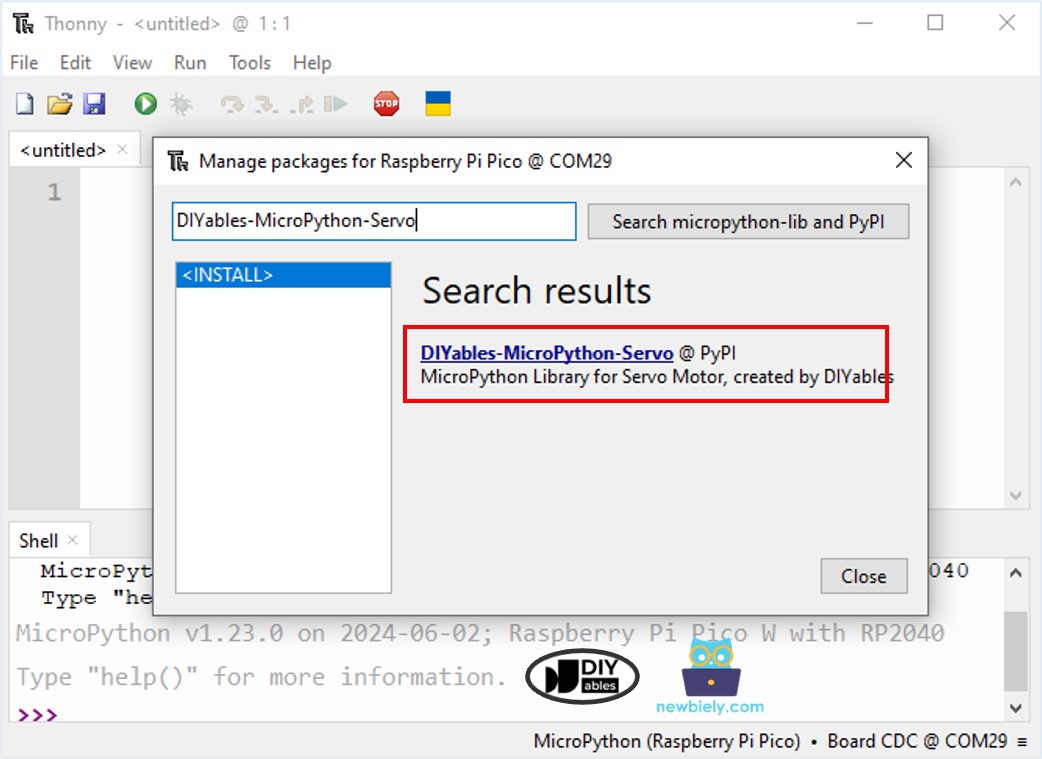
- Thonny IDE의 도구 패키지 관리로 이동하세요.
- “DIYables-MicroPython-Servo”를 검색한 후 DIYables에서 만든 서보 모터 라이브러리를 찾으세요.
- DIYables-MicroPython-Servo를 클릭한 다음, 서보 모터 라이브러리를 설치하려면 Install 버튼을 클릭하세요.
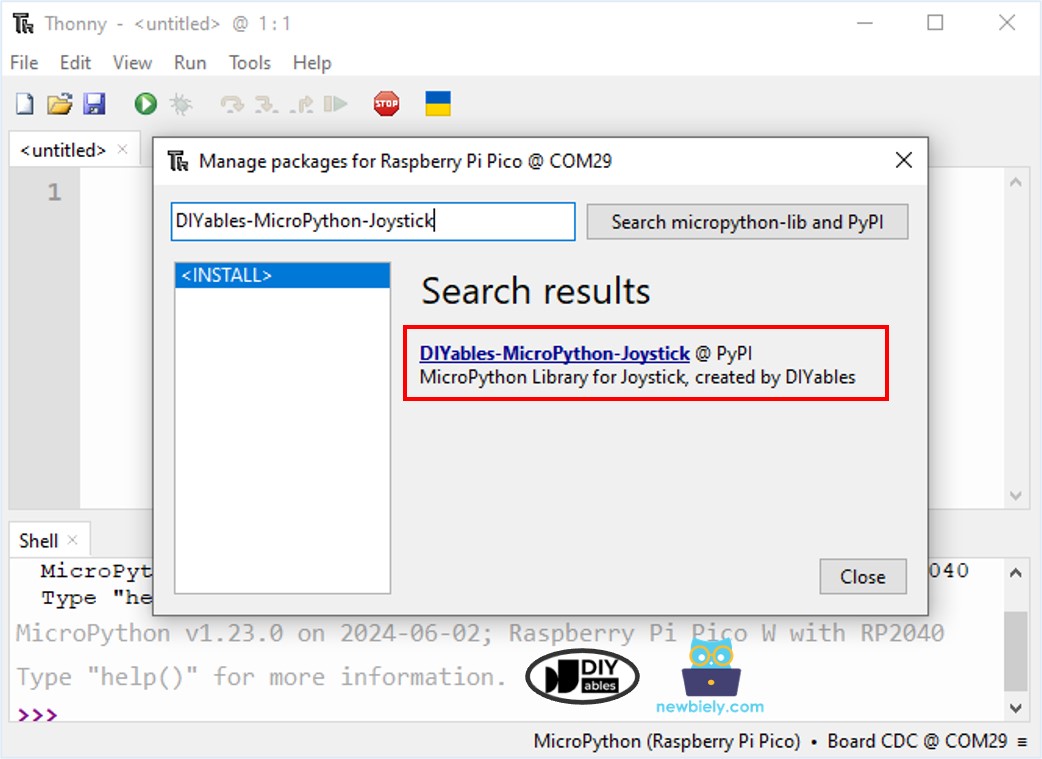
- “DIYables-MicroPython-Joystick”를 검색한 후, DIYables가 만든 Joystick 라이브러리를 찾습니다.
- DIYables-MicroPython-Joystick를 클릭한 후 Install 버튼을 클릭하여 Joystick 라이브러리를 설치합니다.
- 위 코드를 복사하여 Thonny IDE의 편집기에 붙여넣으세요.
- Raspberry Pi Pico에 스크립트를 저장하려면:
• 저장 버튼을 클릭하거나 Ctrl+S 키를 사용하세요.
• 저장 대화 상자에서 두 개의 섹션(이 컴퓨터 및 Raspberry Pi Pico)이 보입니다. Raspberry Pi Pico를 선택하세요.
• 파일을 main.py로 저장하세요.
- 녹색 Run 버튼(또는 F5 키)을 클릭하여 스크립트를 실행하세요. 스크립트가 실행됩니다.
- 조이스틱을 아무 방향으로 밀어보세요.
- 서보 모터가 회전하는 것을 확인하세요.
- Thonny 하단의 Shell에서 메시지를 확인하세요.
라즈베리 파이 피코 코드 - 조이스틱을 사용하여 서보 모터 제어
자세한 사용 방법
- 제공된 MicroPython 코드를 복사하여 Thonny 에디터에 붙여넣습니다.
- 코드를 Raspberry Pi Pico에 저장합니다.
- 녹색 Run 버튼을 클릭하거나 F5 키를 눌러 스크립트를 실행합니다.
- 조이스틱을 아무 방향으로나 움직입니다.
- 서보 모터가 회전하는 것을 관찰합니다.
- Thonny 하단의 Shell에 나타난 메시지를 확인합니다.
코드 설명
소스 코드 주석에 있는 설명을 보세요.
동영상
비디오 제작은 시간이 많이 걸리는 작업입니다. 비디오 튜토리얼이 학습에 도움이 되었다면, YouTube 채널 을 구독하여 알려 주시기 바랍니다. 비디오에 대한 높은 수요가 있다면, 비디오를 만들기 위해 노력하겠습니다.



