라즈베리 파이 GPS
이 튜토리얼은 NEO-6M GPS 모듈과 함께 Raspberry Pi를 사용하는 방법을 안내합니다. 자세히 알아볼 내용은 다음과 같습니다:
- 라즈베리 파이를 NEO-6M GPS 모듈에 연결하는 방법
- 라즈베리 파이를 프로그래밍하여 NEO-6M GPS 모듈에서 GPS 좌표(경도, 위도 및 고도)를 읽는 방법
- 라즈베리 파이를 프로그래밍하여 현재 GPS 위치에서 미리 정의된 GPS 좌표(예: 런던의 좌표)까지의 거리를 계산하는 방법
위도, 경도, 고도 외에도 Raspberry Pi는 NEO-6M GPS 모듈을 통해 GPS 속도(km/h)와 날짜 및 시간을 읽을 수 있습니다.
준비물
| 1 | × | 라즈베리 파이 5 | 쿠팡 | 아마존 | |
| 1 | × | NEO-6M GPS module | 아마존 | |
| 1 | × | 점퍼케이블 | 쿠팡 | 아마존 | |
| 1 | × | (추천) 라즈베리 파이용 스크루 터미널 블록 쉴드 | 쿠팡 | 아마존 | |
| 1 | × | (추천) 라즈베리 파이 프로토타이핑 베이스 플레이트 & 브레드보드 키트 | 아마존 | |
| 1 | × | (추천) 라즈베리 파이용 HDMI 터치 스크린 모니터 | 아마존 |
공개: 이 포스팅 에 제공된 일부 링크는 아마존 제휴 링크입니다. 이 포스팅은 쿠팡 파트너스 활동의 일환으로, 이에 따른 일정액의 수수료를 제공받습니다.
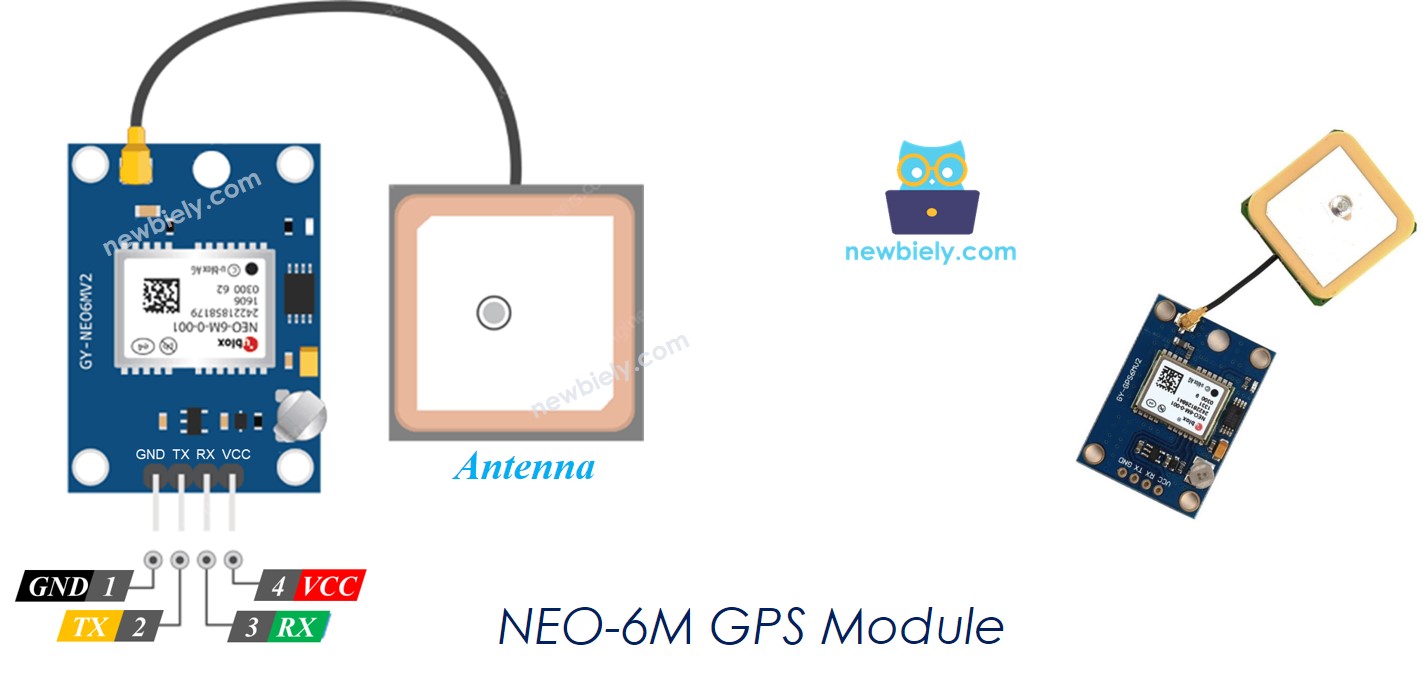
NEO-6M GPS 모듈에 대하여
NEO-6M GPS 모듈은 다음과 같은 정보를 제공할 수 있는 GPS 모듈입니다:
- 경도
- 위도
- 고도
- GPS 속도 (km/h)
- 날짜 시간
NEO-6M GPS 모듈 핀아웃
NEO-6M GPS 모듈에는 네 개의 핀이 있습니다.
- VCC 핀: 이 핀은 VCC(3.3V 또는 5V)에 연결해야 합니다.
- GND 핀: 이 핀은 GND(0V)에 연결해야 합니다.
- TX 핀: 이 핀은 직렬 통신에 사용되며 Raspberry Pi의 직렬 RX 핀에 연결해야 합니다.
- RX 핀: 이 핀은 직렬 통신에 사용되며 Raspberry Pi의 직렬 TX 핀에 연결해야 합니다.
선연결
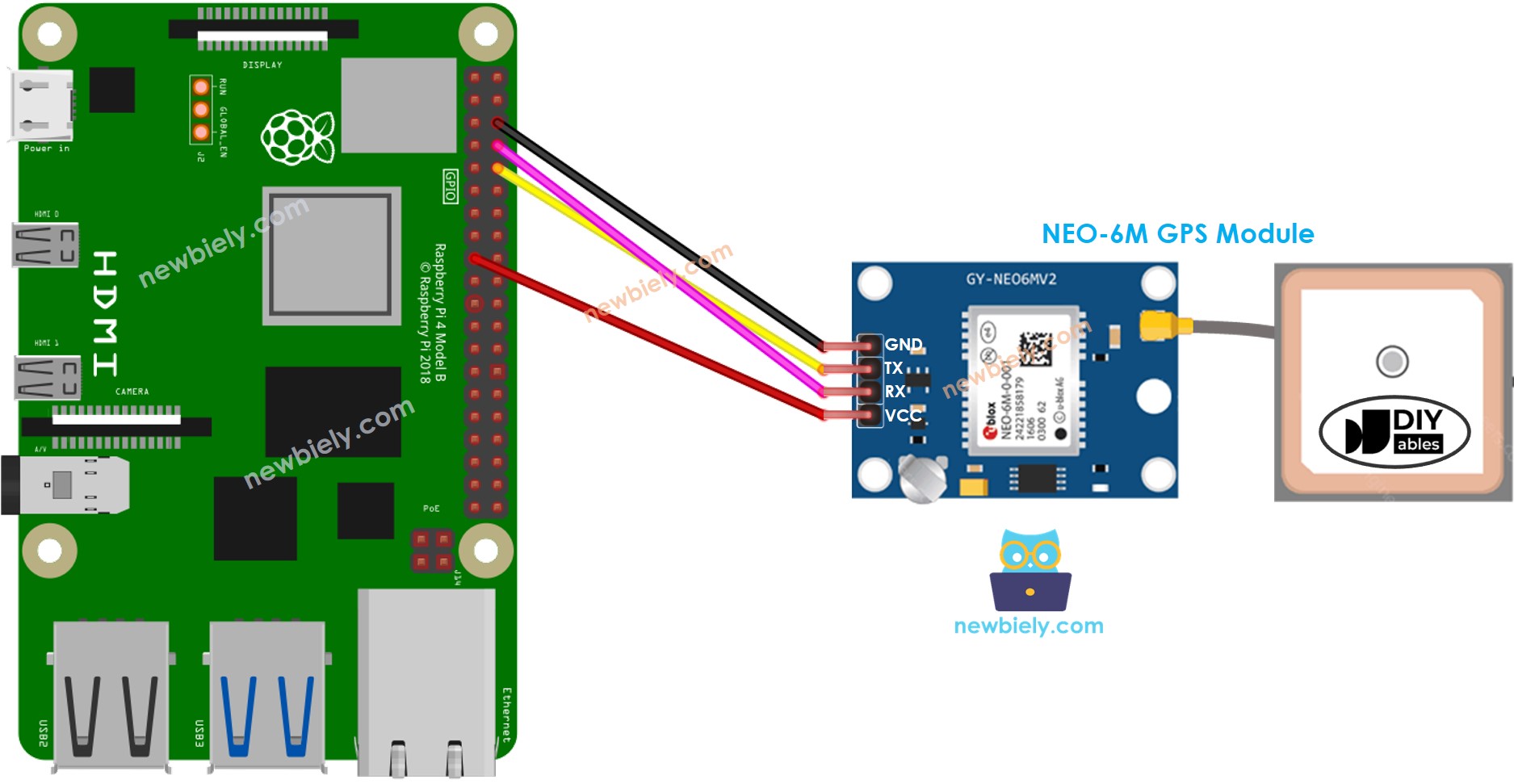
이 이미지는 Fritzing을 사용하여 만들어졌습니다. 이미지를 확대하려면 클릭하세요.
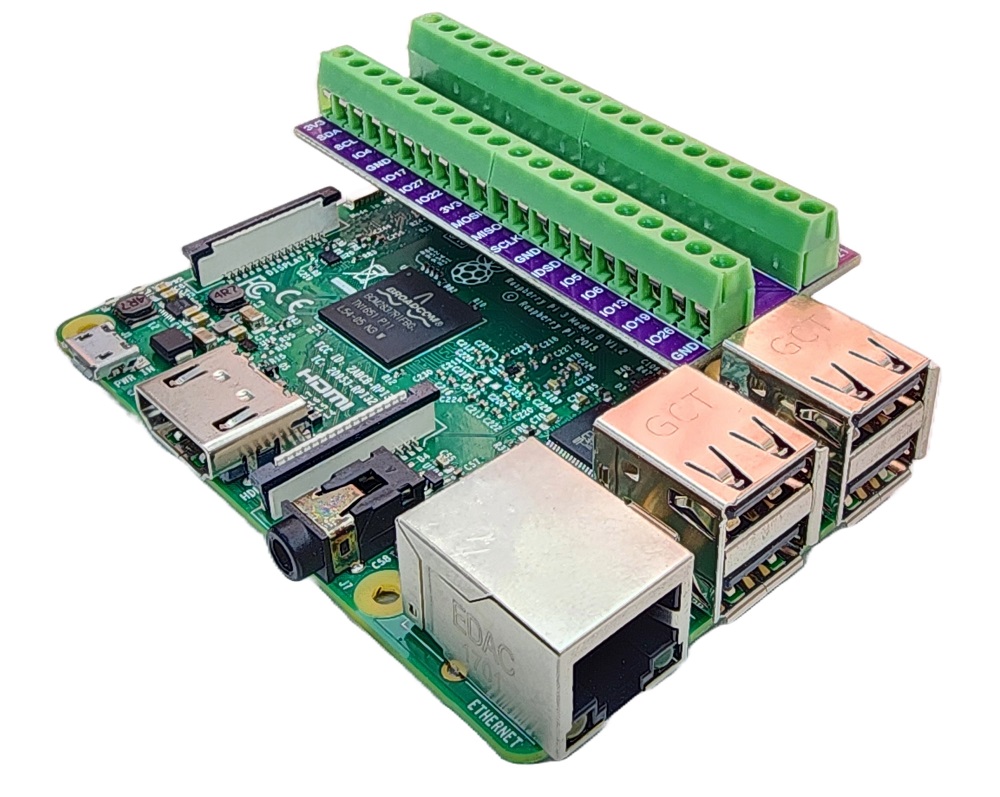
배선 구성을 간단하고 체계적으로 만들기 위해, Raspberry Pi용 스크루 터미널 블록 실드 사용을 권장합니다. 이 실드는 아래와 같이 더욱 안정적이고 관리하기 쉬운 연결을 제공합니다:
라즈베리 파이 코드
GPS 좌표, 속도 (km/h), 날짜 및 시간 읽기
자세한 사용 방법
- Raspberry Pi에 Raspbian 또는 다른 Raspberry Pi 호환 운영 체제가 설치되어 있는지 확인하십시오.
- Raspberry Pi가 PC와 같은 로컬 네트워크에 연결되어 있는지 확인하십시오.
- 라이브러리를 설치해야 하는 경우 Raspberry Pi가 인터넷에 연결되어 있는지 확인하십시오.
- 처음 Raspberry Pi를 사용하는 경우 라즈베리 파이 - 소프트웨어 설치을 참조하십시오.
- Linux 및 macOS의 기본 SSH 클라이언트 또는 Windows의 PuTTY를 사용하여 SSH를 통해 PC를 Raspberry Pi에 연결하십시오. SSH를 통해 PC를 Raspberry Pi에 연결하는 방법을 참조하십시오.
- RPi.GPIO 라이브러리가 설치되어 있는지 확인하십시오. 설치되어 있지 않다면, 다음 명령어를 사용하여 설치하십시오:
sudo apt-get update
sudo apt-get install python3-rpi.gpio
- Raspberry Pi - 직렬 인터페이스 활성화 방법의 지침에 따라 Raspberry Pi에서 직렬 인터페이스를 활성화하십시오.
- GPS 모듈과의 통신을 위해 pyserial 라이브러리를 설치하십시오:
pip install pyserial
- Python 스크립트 파일 gps.py을(를) 생성하고 다음 코드를 추가하십시오:
/*
* 이 라즈베리 파이 코드는 newbiely.kr 에서 개발되었습니다
* 이 라즈베리 파이 코드는 어떠한 제한 없이 공개 사용을 위해 제공됩니다.
* 상세한 지침 및 연결도에 대해서는 다음을 방문하세요:
* https://newbiely.kr/tutorials/raspberry-pi/raspberry-pi-gps
*/
import serial
import time
from datetime import datetime
GPS_BAUD = 9600
# Create serial object for GPS
GPS = serial.Serial('/dev/serial0', GPS_BAUD, timeout=1)
print("Raspberry Pi - GPS Module")
try:
while True:
if GPS.in_waiting > 0:
gps_data = GPS.readline().decode('utf-8').strip()
if gps_data.startswith('$GPGGA'):
# Process GPS data using TinyGPS++
# You may need to adapt this part based on the structure of your GPS data
print(f"Received GPS data: {gps_data}")
# Extract relevant information
data_parts = gps_data.split(',')
latitude = data_parts[2]
longitude = data_parts[4]
altitude = data_parts[9]
# Print extracted information
print(f"- Latitude: {latitude}")
print(f"- Longitude: {longitude}")
print(f"- Altitude: {altitude} meters")
# You can add more processing as needed
time.sleep(1)
except KeyboardInterrupt:
print("\nExiting the script.")
GPS.close()
- 파일을 저장하고 터미널에서 다음 명령을 실행하여 Python 스크립트를 실행하십시오:
python3 gps.py
- 터미널에서 결과를 확인하세요.
PuTTY - Raspberry Pi
스크립트는 터미널에서 Ctrl + C를 누를 때까지 무한 루프로 계속 실행됩니다.
현재 위치에서 미리 정의된 위치까지의 거리 계산
아래 코드는 현재 위치와 런던(위도: 51.508131, 경도: -0.128002) 사이의 거리를 계산합니다.
자세한 사용 방법
- geopy 라이브러리를 거리 계산을 위해 설치하십시오:
pip3 install geopy
- Python 스크립트 파일 gps_distance.py을(를) 생성하고 다음 코드를 추가하세요:
/*
* 이 라즈베리 파이 코드는 newbiely.kr 에서 개발되었습니다
* 이 라즈베리 파이 코드는 어떠한 제한 없이 공개 사용을 위해 제공됩니다.
* 상세한 지침 및 연결도에 대해서는 다음을 방문하세요:
* https://newbiely.kr/tutorials/raspberry-pi/raspberry-pi-gps
*/
import serial
import time
from geopy.distance import geodesic
GPS_BAUD = 9600
LONDON_LAT = 51.508131
LONDON_LON = -0.128002
# Create serial object for GPS
gps = serial.Serial('/dev/serial0', GPS_BAUD, timeout=1)
print("Raspberry Pi - GPS Module")
try:
while True:
if gps.in_waiting > 0:
gps_data = gps.readline().decode('utf-8').strip()
if gps_data.startswith('$GPGGA'):
# Process GPS data using TinyGPS++
# You may need to adapt this part based on the structure of your GPS data
print(f"Received GPS data: {gps_data}")
# Extract relevant information
data_parts = gps_data.split(',')
latitude = float(data_parts[2])
longitude = float(data_parts[4])
# Print extracted information
print(f"- Latitude: {latitude}")
print(f"- Longitude: {longitude}")
# Calculate distance to London using geopy
current_location = (latitude, longitude)
london_location = (LONDON_LAT, LONDON_LON)
distance_km = geodesic(current_location, london_location).kilometers
# Print calculated distance
print(f"- Distance to London: {distance_km:.2f} km")
time.sleep(1)
except KeyboardInterrupt:
print("\nExiting the script.")
gps.close()
- 파일을 저장하고 터미널에서 다음 명령어를 실행하여 파이썬 스크립트를 실행하세요:
python3 gps_distance.py
- 터미널에서 결과를 확인하세요.
PuTTY - Raspberry Pi
동영상
비디오 제작은 시간이 많이 걸리는 작업입니다. 비디오 튜토리얼이 학습에 도움이 되었다면, YouTube 채널 을 구독하여 알려 주시기 바랍니다. 비디오에 대한 높은 수요가 있다면, 비디오를 만들기 위해 노력하겠습니다.



