라즈베리 파이 키패드 서보 모터
이 튜토리얼은 Raspberry Pi와 키패드를 사용하여 서보 모터를 제어하는 방법을 안내합니다. 자세히:
- 키패드에 허가된 비밀번호가 입력되면 라즈베리 파이가 서보 모터를 90°로 회전시킵니다.
- 설정된 시간이 지나면 라즈베리 파이가 서보 모터를 0°로 다시 회전시킵니다.
Raspberry Pi의 코드는 여러 비밀번호를 사용할 수 있도록 허용합니다.
준비물
| 1 | × | 라즈베리 파이 5 | 쿠팡 | 아마존 | |
| 1 | × | 키패드 | 쿠팡 | 아마존 | |
| 1 | × | 서보 모터 | 쿠팡 | 아마존 | |
| 1 | × | 5V 전원 어댑터 | 아마존 | |
| 1 | × | DC 커넥터 전원 연결 잭 플러그 소켓 | 쿠팡 | 아마존 | |
| 1 | × | 점퍼케이블 | 쿠팡 | 아마존 | |
| 1 | × | (추천) 라즈베리 파이용 스크루 터미널 블록 쉴드 | 쿠팡 | 아마존 | |
| 1 | × | (추천) 라즈베리 파이 프로토타이핑 베이스 플레이트 & 브레드보드 키트 | 아마존 | |
| 1 | × | (추천) 라즈베리 파이용 HDMI 터치 스크린 모니터 | 아마존 |
키패드와 서보 모터에 대하여
키패드와 서보 모터(핀 배치, 기능, 프로그래밍 등)에 익숙하지 않은 경우, 다음 튜토리얼이 도움이 될 수 있습니다:
- 라즈베리 파이 - 키패드 튜토리얼
- 라즈베리 파이 - 서보 모터 튜토리얼
선연결
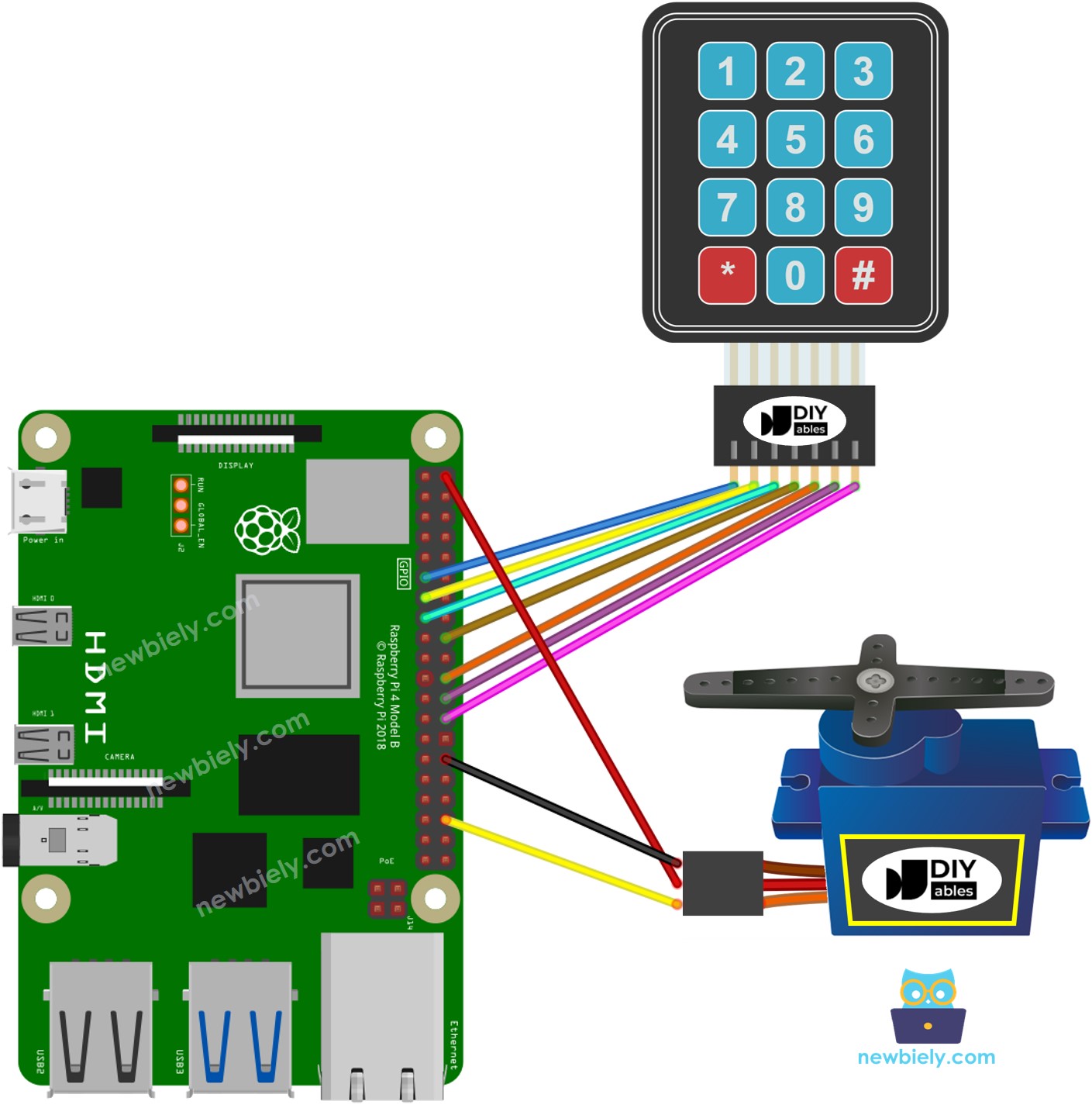
이 이미지는 Fritzing을 사용하여 만들어졌습니다. 이미지를 확대하려면 클릭하세요.
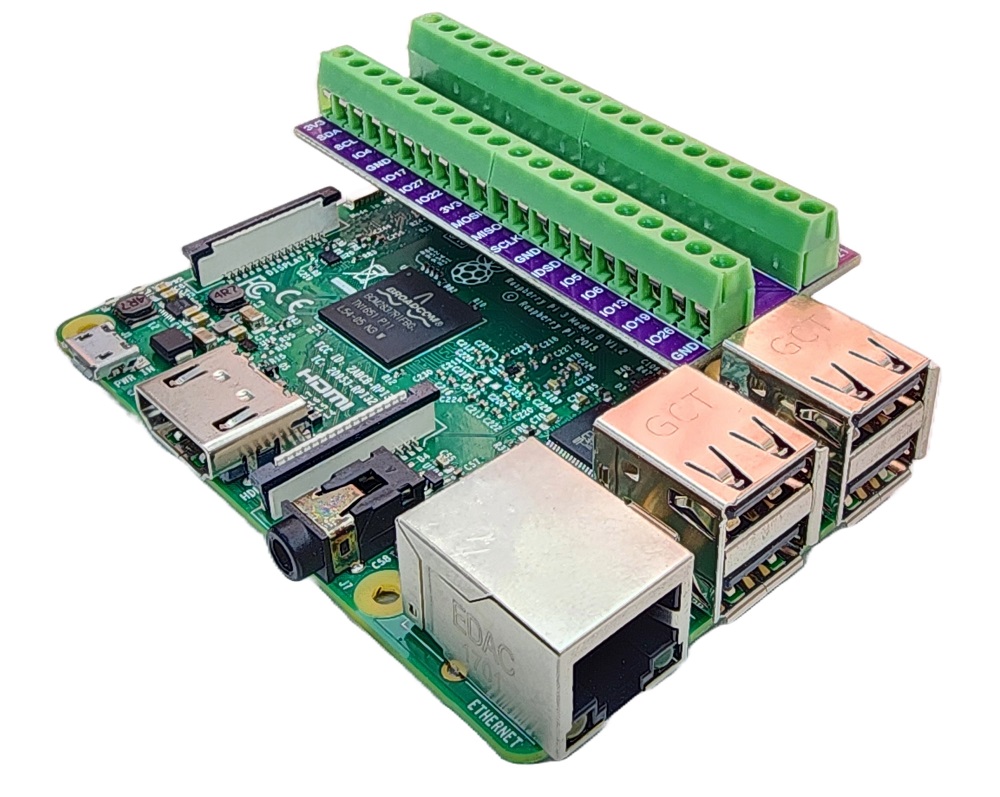
배선 구성을 간단하고 체계적으로 만들기 위해, Raspberry Pi용 스크루 터미널 블록 실드 사용을 권장합니다. 이 실드는 아래와 같이 더욱 안정적이고 관리하기 쉬운 연결을 제공합니다:
위에 표시된 배선도는 토크가 낮은 서보 모터에만 적합함을 참고하세요. 모터가 회전하지 않고 진동할 경우, 서보 모터에 더 많은 전력을 공급하기 위해 외부 전원을 사용해야 합니다. 아래에는 서보 모터용 외부 전원 배선도가 나와 있습니다.
이미지를 추가하세요
외부 전원의 GND를 아두이노 라즈베리 파이의 GND에 연결하는 것을 잊지 마세요.
라즈베리 파이 코드 - 비밀번호가 올바르면 서보 모터를 회전시킴
비밀번호가 맞으면 서보 모터가 90°로 설정되어 5초 동안 유지됩니다. 5초가 지나면 서보 모터가 0°로 재설정됩니다.
자세한 사용 방법
- Raspberry Pi에 Raspbian 또는 기타 Raspberry Pi 호환 운영 체제가 설치되어 있는지 확인하세요.
- Raspberry Pi가 PC와 동일한 로컬 네트워크에 연결되어 있는지 확인하세요.
- 라이브러리를 설치해야 하는 경우 Raspberry Pi가 인터넷에 연결되어 있는지 확인하세요.
- Raspberry Pi를 처음 사용하는 경우, 라즈베리 파이 - 소프트웨어 설치을 참조하세요.
- Linux 및 macOS의 기본 SSH 클라이언트 또는 Windows의 PuTTY를 사용하여 SSH를 통해 PC를 Raspberry Pi에 연결하세요. SSH를 통해 PC를 Raspberry Pi에 연결하는 방법을 참조하세요.
- RPi.GPIO 라이브러리가 설치되어 있는지 확인하세요. 설치되어 있지 않다면, 다음 명령어를 사용하여 설치하세요.
- keypad_servo.py라는 Python 스크립트 파일을 만들고 다음 코드를 추가하세요:
- 파일을 저장하고 터미널에서 다음 명령어를 실행하여 Python 스크립트를 실행하세요:
스크립트는 터미널에서 Ctrl + C를 누를 때까지 무한 루프에서 계속 실행됩니다.
- 12345#을(를) 누르세요.
- 5642B#을(를) 입력하세요.
- 시리얼 모니터에서 결과와 서보 모터의 위치를 확인하세요.
코드 설명
유효한 비밀번호는 라즈베리 파이 코드에 미리 정의되어 있습니다. input_password라고 하는 문자열은 사용자가 입력한 비밀번호를 저장하는 데 사용됩니다. 키패드에서는 두 개의 키(*와 #)가 특별한 용도로 사용됩니다: 비밀번호 지우기 및 비밀번호 종료. 키패드에서 키가 눌리면:
- 두 개의 특수 키 중 하나가 아닌 키가 눌리면 input_password에 추가됩니다.
- 눌린 키가 *이면 input_password가 지워집니다. 이는 암호 입력을 시작하거나 다시 시작하는 데 사용할 수 있습니다.
- 눌린 키가 #이면:
- Raspberry Pi가 input_password가 미리 정의된 비밀번호 중 하나와 일치하는지 확인하고, 서보 모터가 90°로 회전합니다.
- 비밀번호가 맞든 틀리든 다음 입력을 위해 input_password가 지워집니다.
- 일정 시간이 지나면 ESP8266이 서보 모터를 0°로 회전시킵니다.
동영상
비디오 제작은 시간이 많이 걸리는 작업입니다. 비디오 튜토리얼이 학습에 도움이 되었다면, YouTube 채널 을 구독하여 알려 주시기 바랍니다. 비디오에 대한 높은 수요가 있다면, 비디오를 만들기 위해 노력하겠습니다.



