라즈베리 파이 장애물 센서
이 튜토리얼은 적외선 장애물 회피 센서를 사용하여 Raspberry Pi를 사용하는 방법을 안내합니다. 자세히 알아볼 내용은 다음과 같습니다.
- 라즈베리 파이를 적외선 장애물 회피 센서에 연결하는 방법.
- 라즈베리 파이에서 적외선 장애물 회피 센서의 상태를 읽도록 프로그래밍하는 방법.
- 라즈베리 파이가 장애물을 감지하도록 프로그래밍하는 방법.
준비물
| 1 | × | 라즈베리 파이 5 | 쿠팡 | 아마존 | |
| 1 | × | IR 장애물 회피 센서 | 아마존 | |
| 1 | × | (또는) TCRT5000 Obstacle Avoidance Sensor | 아마존 | |
| 1 | × | 점퍼케이블 | 쿠팡 | 아마존 | |
| 1 | × | (추천) 라즈베리 파이용 스크루 터미널 블록 쉴드 | 쿠팡 | 아마존 | |
| 1 | × | (추천) 라즈베리 파이 프로토타이핑 베이스 플레이트 & 브레드보드 키트 | 아마존 | |
| 1 | × | (추천) 라즈베리 파이용 HDMI 터치 스크린 모니터 | 아마존 |
IR 장애물 회피 센서에 대하여
적외선 장애물 센서는 적외선 신호를 사용하여 앞에 있는 물체의 존재를 감지할 수 있습니다. 감지 범위는 2cm에서 30cm까지이며, 내장된 가변 저항기로 조정할 수 있습니다.
적외선 장애물 회피 센서 핀 배열
IR 장애물 회피 센서는 세 개의 핀이 있습니다:
- GND 핀: GND (0V)에 연결해야 합니다.
- VCC 핀: VCC (5V 또는 3.3V)에 연결해야 합니다.
- OUT 핀: 출력 핀으로, 장애물이 있을 때는 LOW, 장애물이 없을 때는 HIGH 상태를 나타냅니다. 이 핀은 Raspberry Pi 입력 핀에 연결해야 합니다.
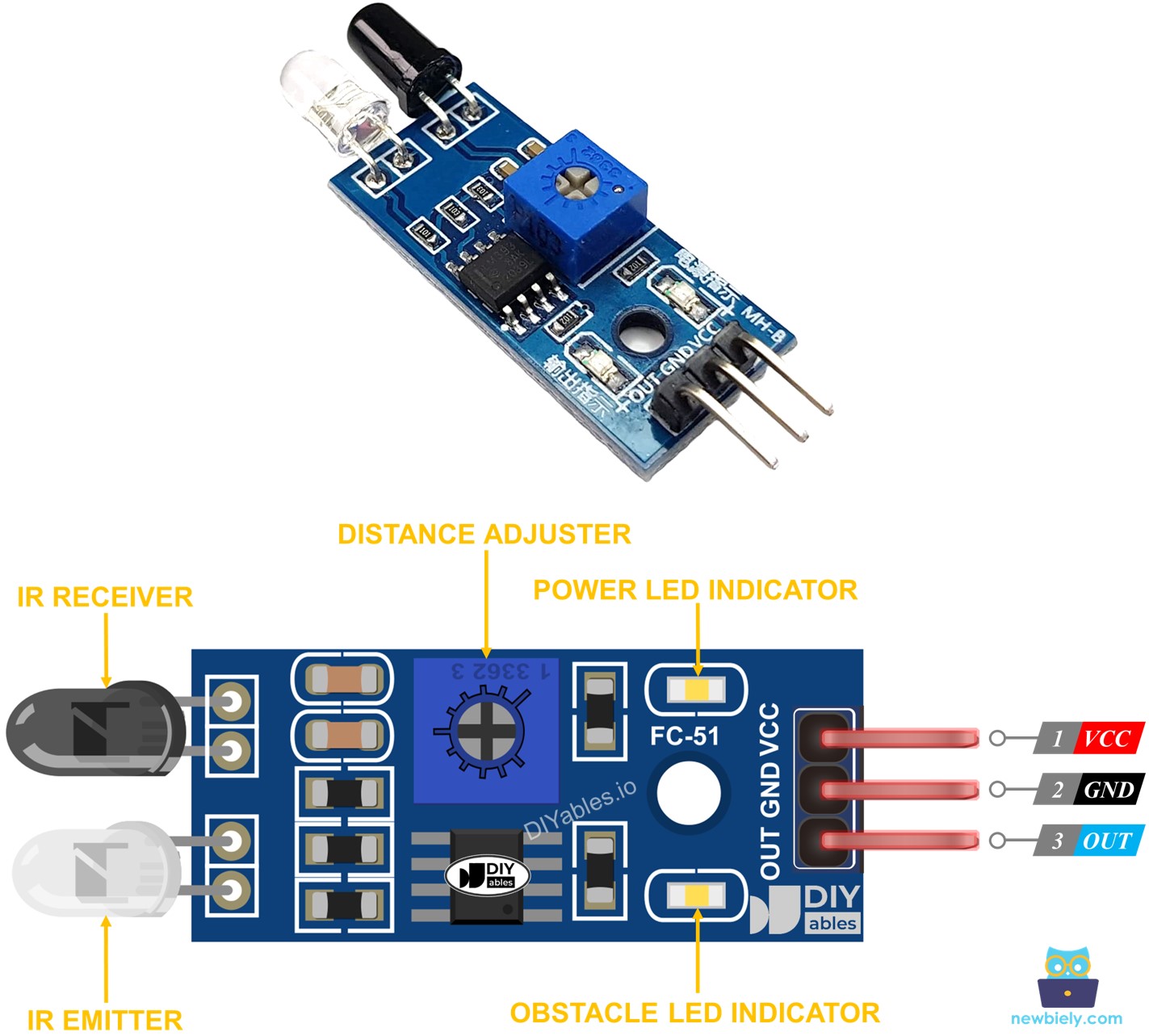
작동 방식
적외선 장애물 감지 센서 모듈에는 내장 IR 송신기와 IR 수신기가 있습니다. IR 송신기는 IR 신호를 보냅니다. IR 수신기는 반사된 IR 신호를 찾아 장애물이 있는지 여부를 감지합니다. 센서의 OUT 핀은 장애물의 존재를 반영합니다:
- 센서 앞에 장애물이 있는 경우, 센서의 OUT 핀은 LOW가 됩니다.
- 센서 앞에 장애물이 없는 경우, 센서의 OUT 핀은 HIGH가 됩니다.
※ 주의:
운송 중에 센서가 변형될 수 있으며, 이는 오작동을 유발할 수 있습니다. 센서가 제대로 작동하지 않으면 IR 송신기와 수신기를 조정하여 서로 평행하도록 하세요.
선연결
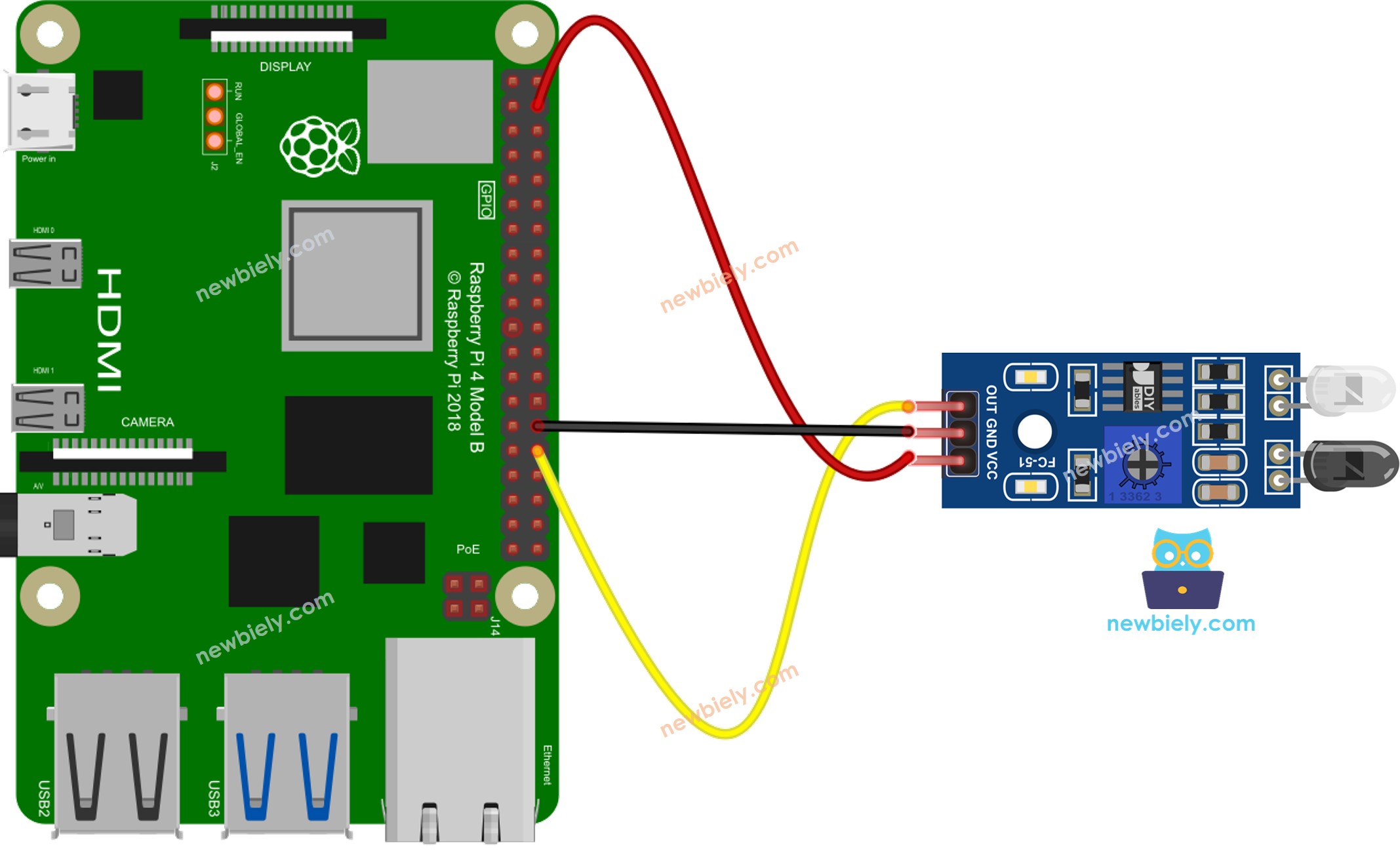
이 이미지는 Fritzing을 사용하여 만들어졌습니다. 이미지를 확대하려면 클릭하세요.
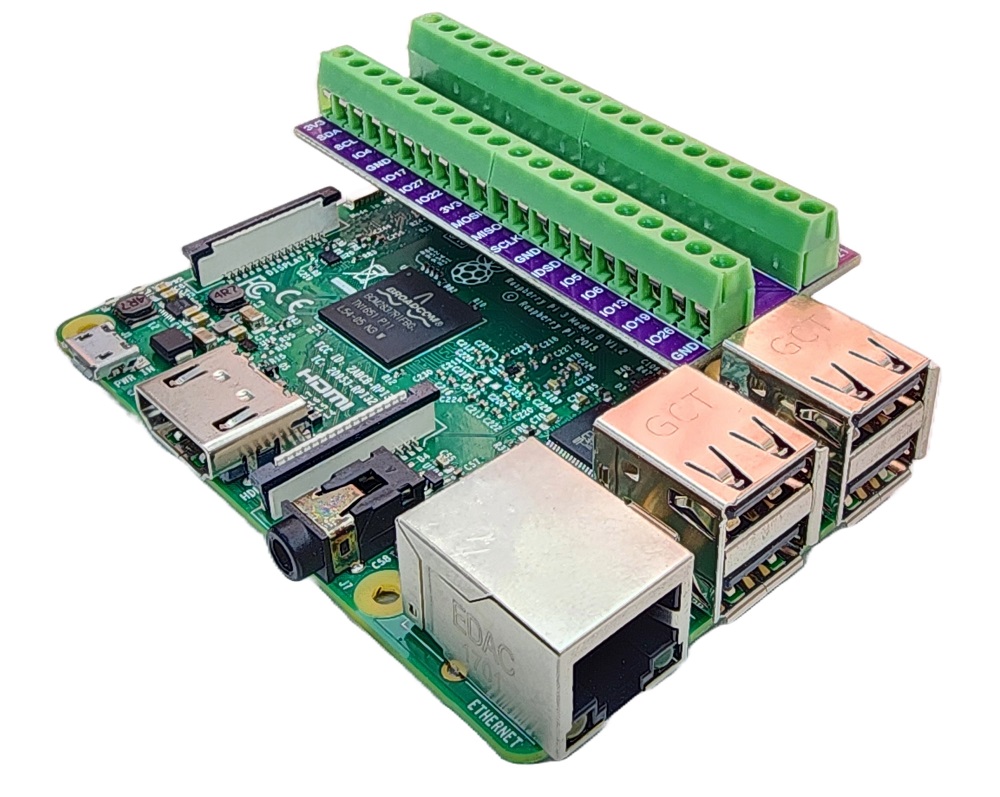
배선 구성을 간단하고 체계적으로 만들기 위해, Raspberry Pi용 스크루 터미널 블록 실드 사용을 권장합니다. 이 실드는 아래와 같이 더욱 안정적이고 관리하기 쉬운 연결을 제공합니다:
IR 장애물 회피 센서를 위한 프로그래밍 방법
- GPIO.setup() 함수를 사용하여 Raspberry Pi 핀을 디지털 입력 모드로 초기화합니다.
- GPIO.input() 함수를 사용하여 Raspberry Pi 핀의 상태를 확인하십시오.
라즈베리 파이 코드
장애물 회피 애플리케이션을 프로그래밍할 때 두 가지 접근 방식을 사용할 수 있습니다:
- 장애물이 있는지 여부에 따라 조치 취하기
- 장애물이 감지되었거나 제거되었는지에 따라 조치 취하기
장애물 감지 여부를 확인하는 라즈베리 파이 코드
자세한 사용 방법
- Raspberry Pi에 Raspbian 또는 기타 Raspberry Pi 호환 운영 체제가 설치되어 있는지 확인하세요.
- Raspberry Pi가 PC와 동일한 로컬 네트워크에 연결되어 있는지 확인하세요.
- 일부 라이브러리를 설치해야 하는 경우 Raspberry Pi가 인터넷에 연결되어 있는지 확인하세요.
- Raspberry Pi를 처음 사용하는 경우, 라즈베리 파이 - 소프트웨어 설치을 참조하세요.
- Linux와 macOS의 내장 SSH 클라이언트 또는 Windows의 PuTTY를 사용하여 SSH를 통해 PC를 Raspberry Pi에 연결하세요. SSH를 통해 PC를 Raspberry Pi에 연결하는 방법을 참조하세요.
- RPi.GPIO 라이브러리가 설치되어 있는지 확인하세요. 설치되어 있지 않다면, 다음 명령어를 사용하여 설치하세요:
- Python 스크립트 파일 obstacle_sensor.py를 생성하고 다음 코드를 추가하세요.
- 파일을 저장하고 터미널에서 다음 명령을 실행하여 Python 스크립트를 실행하십시오.
- 센서 앞에 장애물을 일정 시간 동안 두었다가 제거합니다.
- 터미널에서 결과를 확인합니다.
스크립트는 터미널에서 Ctrl + C를 누를 때까지 무한 루프에서 계속 실행됩니다.
장애물 감지를 위한 라즈베리 파이 코드
자세한 사용 방법
- Python 스크립트 파일 obstacle_sensor_events.py을(를) 생성하고 다음 코드를 추가하세요.
- 파일을 저장하고 터미널에서 다음 명령어를 실행하여 파이썬 스크립트를 실행하세요:
- 잠시 동안 센서 앞에 장애물을 두었다가 제거하세요.
- 터미널에서 결과를 확인하세요.
동영상
비디오 제작은 시간이 많이 걸리는 작업입니다. 비디오 튜토리얼이 학습에 도움이 되었다면, YouTube 채널 을 구독하여 알려 주시기 바랍니다. 비디오에 대한 높은 수요가 있다면, 비디오를 만들기 위해 노력하겠습니다.



