아두이노 우노 R4 세르보 모터가 가변 저항기로 제어됨
이전 수업에서는 가변 저항기가 서보 모터를 어떻게 작동시키는지 배웠습니다. 이번 수업에서는 가변 저항기의 출력 값을 기반으로 서보 모터를 회전시키는 방법을 배울 것입니다.
준비물
| 1 | × | Arduino UNO R4 WiFi or Arduino UNO R4 Minima | ||
| 1 | × | (또는) DIYables STEM V4 IoT, Compatible with Arduino Uno R4 WiFi | 쿠팡 | 아마존 | |
| 1 | × | USB 케이블 타입-A to 타입-C (USB-A PC용) | 쿠팡 | 아마존 | |
| 1 | × | USB 케이블 타입-C to 타입-C (USB-C PC용) | 아마존 | |
| 1 | × | 서보 모터 | 쿠팡 | 아마존 | |
| 1 | × | 포텐셔미터 | 쿠팡 | 아마존 | |
| 1 | × | 노브가 있는 포텐셔미터 모듈 | 쿠팡 | 아마존 | |
| 1 | × | 브레드보드 | 쿠팡 | 아마존 | |
| 1 | × | 점퍼케이블 | 쿠팡 | 아마존 | |
| 1 | × | (추천) 아두이노 우노 R4용 스크루 터미널 블록 쉴드 | 쿠팡 | 아마존 | |
| 1 | × | (추천) Sensors/Servo Expansion Shield for Arduino UNO R4 | 쿠팡 | 아마존 | |
| 1 | × | (추천) 아두이노 우노 R4용 브레드보드 쉴드 | 쿠팡 | 아마존 | |
| 1 | × | (추천) 아두이노 우노 R4용 케이스 | 쿠팡 | 아마존 | |
| 1 | × | (추천) 아두이노 우노 R4용 전원 분배기 | 쿠팡 | 아마존 | |
| 1 | × | (추천) 아두이노 우노용 프로토타이핑 베이스 플레이트 & 브레드보드 키트 | 아마존 |
공개: 이 포스팅 에 제공된 일부 링크는 아마존 제휴 링크입니다. 이 포스팅은 쿠팡 파트너스 활동의 일환으로, 이에 따른 일정액의 수수료를 제공받습니다.
서보 모터 및 가변 저항에 대해
계속 진행하기 전에 서보 모터와 포텐셔미터(핀아웃, 작동 및 프로그래밍)에 익숙하지 않은 경우 아래 튜토리얼을 참조하세요.
선연결
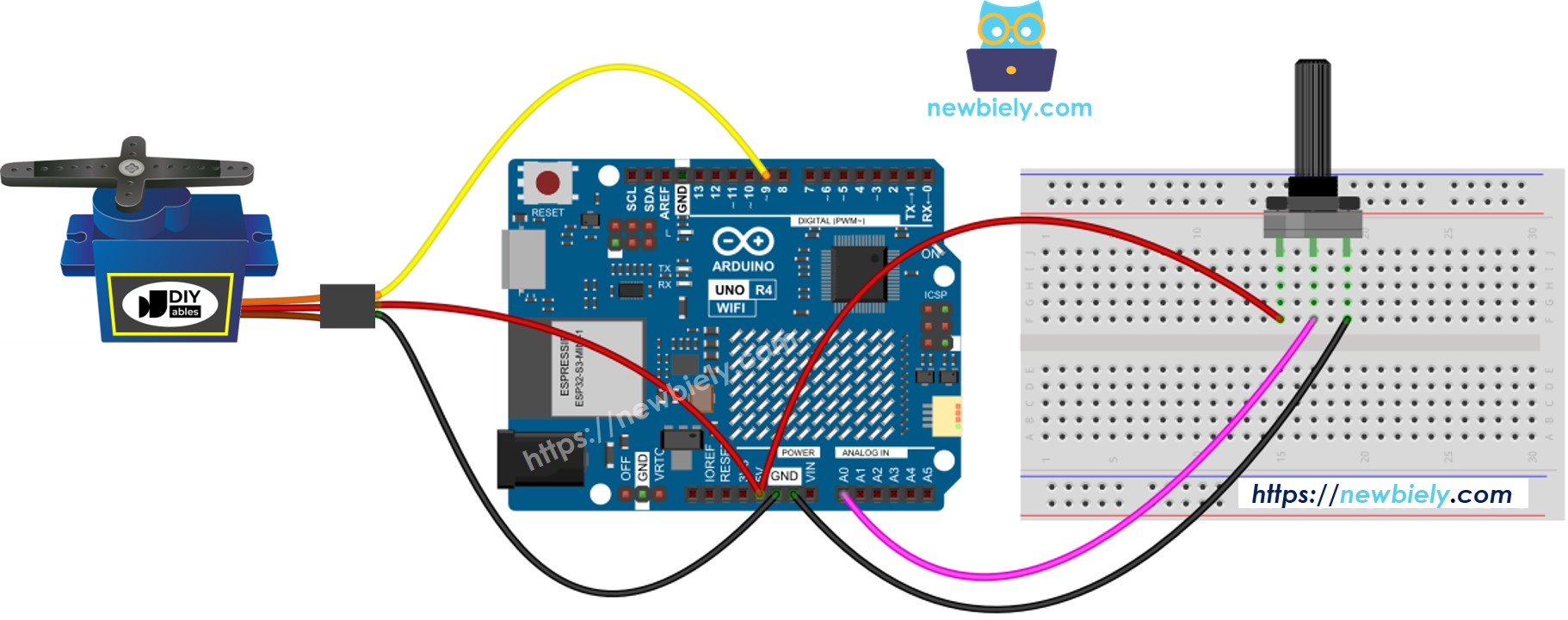
이 이미지는 Fritzing을 사용하여 만들어졌습니다. 이미지를 확대하려면 클릭하세요.
Arduino Uno R4와 기타 부품에 전원을 공급하는 가장 효과적인 방법을 확인하시려면, 아래 링크를 참조하세요: 아두이노 우노 R4 전원 공급 방법.
프로그래밍 방법
- 가변 저항기의 값을 읽습니다 (값 범위: 0에서 1023까지)
int analogValue = analogRead(A0);
0에서 180 사이의 값으로 각도를 조정합니다.
int angle = map(analogValue, 0, 1023, 0, 180);
- 각도에 따라 서보의 위치를 변경합니다.
myServo.write(angle);
아두이노 UNO R4 코드
/*
* 이 아두이노 우노 R4 코드는 newbiely.kr 에서 개발되었습니다
* 이 아두이노 우노 R4 코드는 어떠한 제한 없이 공개 사용을 위해 제공됩니다.
* 상세한 지침 및 연결도에 대해서는 다음을 방문하세요:
* https://newbiely.kr/tutorials/arduino-uno-r4/arduino-uno-r4-potentiometer-servo-motor
*/
#include <Servo.h>
Servo myServo; // create servo object to control a servo
void setup() {
// initialize serial communication at 9600 bits per second:
Serial.begin(9600);
myServo.attach(9); // attaches the servo on pin 9 to the servo object
}
void loop() {
// reads the value of the potentiometer (value between 0 and 1023)
int analogValue = analogRead(A0);
// scales it to use it with the servo (value between 0 and 180)
int angle = map(analogValue, 0, 1023, 0, 180);
// sets the servo position according to the scaled value
myServo.write(angle);
// print out the value
Serial.print("Potentiometer's Value: ");
Serial.print(analogValue);
Serial.print(" => Servo Motor's Angle: ");
Serial.println(angle);
delay(100);
}
자세한 사용 방법
다음 지침을 단계별로 따르세요:
- 만약 Arduino Uno R4 WiFi/Minima를 처음 사용하는 경우, 아두이노 우노 R4 - 소프트웨어 설치에 대한 튜토리얼을 참조하세요.
- 제공된 다이어그램에 따라 부품들을 연결하세요.
- USB 케이블을 사용하여 Arduino Uno R4 보드를 컴퓨터에 연결하세요.
- 컴퓨터에서 Arduino IDE를 실행하세요.
- 적절한 Arduino Uno R4 보드 (예: Arduino Uno R4 WiFi)와 COM 포트를 선택하세요.
- USB 케이블을 사용하여 Arduino UNO R4를 컴퓨터에 연결하세요.
- Arduino IDE를 열고 올바른 보드와 포트를 선택하세요.
- 코드를 Arduino IDE에 붙여넣으세요.
- 코드가 Arduino UNO R4에 전송되도록 Arduino IDE에서 Upload 버튼을 클릭하세요.

- 시리얼 모니터 열기
- 가변 저항기 돌리기
- 서보 모터 회전 관찰하기
- 시리얼 모니터에서 결과 확인하기
8
Serial.println("Hello World!");
Message (Enter to send message to 'Arduino Uno R4 WiFi' on 'COM15')
New Line
9600 baud
Analog: 0, Angle: 0
Analog: 85, Angle: 14
Analog: 201, Angle: 35
Analog: 286, Angle: 50
Analog: 370, Angle: 65
Analog: 444, Angle: 78
Analog: 521, Angle: 91
Analog: 608, Angle: 106
Analog: 690, Angle: 121
Analog: 793, Angle: 139
Analog: 907, Angle: 159
Analog: 1023, Angle: 180
Analog: 1023, Angle: 180
코드 설명
소스 코드의 주석에 작성된 설명을 한 줄씩 확인하세요!
동영상
비디오 제작은 시간이 많이 걸리는 작업입니다. 비디오 튜토리얼이 학습에 도움이 되었다면, YouTube 채널 을 구독하여 알려 주시기 바랍니다. 비디오에 대한 높은 수요가 있다면, 비디오를 만들기 위해 노력하겠습니다.



