아두이노 나노 ESP32 자동차
아두이노 나노 ESP32를 처음 사용해 보신다면 로봇 자동차를 만드는 것이 가장 멋진 시도 중 하나입니다. 이 가이드에서는 아두이노 나노 ESP32를 사용하여 로봇 자동차를 만들고 IR 원격 제어로 제어하는 방법을 배웁니다. 로봇 자동차를 웹(Wifi)을 통해 제어하는 방법은 아두이노 나노 ESP32 - 웹을 통한 자동차 제어 튜토리얼을 참조하세요.

준비물
| 1 | × | 아두이노 나노 ESP32 | 쿠팡 | 아마존 | |
| 1 | × | USB 케이블 타입-A to 타입-C (USB-A PC용) | 쿠팡 | 아마존 | |
| 1 | × | USB 케이블 타입-C to 타입-C (USB-C PC용) | 아마존 | |
| 1 | × | 2WD RC Car | 쿠팡 | 아마존 | |
| 1 | × | L298N 모터 드라이버 모듈 | 쿠팡 | 아마존 | |
| 1 | × | IR 리모컨 키트 | 아마존 | |
| 1 | × | CR2025 배터리 (IR 리모컨용) | 아마존 | |
| 1 | × | 1.5V AA Battery (for Arduino Nano ESP32 and Car) | 아마존 | |
| 1 | × | 점퍼케이블 | 쿠팡 | 아마존 | |
| 1 | × | 브레드보드 | 쿠팡 | 아마존 | |
| 1 | × | (추천) 아두이노 나노용 스크루 터미널 확장 보드 | 쿠팡 | 아마존 | |
| 1 | × | (추천) 아두이노 나노용 브레이크아웃 확장 보드 | 쿠팡 | 아마존 | |
| 1 | × | (추천) 아두이노 나노 ESP32용 전원 분배기 | 쿠팡 | 아마존 |
로봇 자동차에 대하여
아두이노 나노 ESP32의 맥락에서 로봇 자동차는 로봇 자동차, RC 자동차, 원격 제어 자동차, 스마트 자동차 또는 DIY 자동차와 같이 다양한 이름으로 불립니다. 그것은 어떠한 전선 없이도 멀리서 조종할 수 있습니다. 적외선을 사용하는 특별한 원격 조종기나 Bluetooth 또는 WiFi를 통한 스마트폰 앱을 사용할 수 있습니다. 로봇 자동차는 왼쪽이나 오른쪽으로 갈 수 있으며 앞으로 또는 뒤로도 갈 수 있습니다.
Arduino Nano ESP32를 위한 2륜 구동(2WD: Two-Wheel Drive) 자동차는 Arduino Nano ESP32 보드를 사용하여 구축하고 제어할 수 있는 작은 로봇 차량입니다. 이것은 일반적으로 다음 구성 요소들로 이루어져 있습니다:
- 차체: 차의 기본이나 프레임으로, 다른 모든 구성 요소가 설치되는 곳입니다.
- 바퀴: 차를 움직이게 하는 두 개의 바퀴입니다. 이들은 두 개의 DC 모터에 연결되어 있습니다.
- 모터: 두 바퀴를 구동하기 위해 두 개의 DC 모터가 사용됩니다.
- 모터 드라이버: 모터 드라이버 보드는 Arduino Nano ESP32와 모터 사이의 인터페이스를 제공하는 필수 구성 요소입니다. 이는 Arduino Nano ESP32에서 오는 신호를 받아 모터에 필요한 전력과 제어를 제공합니다.
- Arduino Nano ESP32 보드: 차의 두뇌입니다. 센서와 사용자 명령어로부터 입력을 읽고 그에 따라 모터를 제어합니다.
- 전원 공급원: 2WD 차는 주로 배터리와 배터리 홀더를 사용하여 모터와 Arduino Nano ESP32 보드에 전력을 공급하는 전원 공급원이 필요합니다.
- 무선 수신기: 원격 제어나 스마트폰과 무선 통신을 위한 적외선, 블루투스 또는 와이파이 모듈입니다.
- 선택 구성 요소: 프로젝트의 복잡성에 따라, 센서(예: 장애물 회피를 위한 초음파 센서, 선 따라가기 센서)와 같은 다양한 선택 구성 요소를 추가할 수 있습니다.
이 튜토리얼에서는 간단하게 하기 위해, 우리는 다음을 사용할 것입니다:
- 2WD 자동차 키트(샤시, 바퀴, 모터, 배터리 홀더 포함)
- L298N 모터 드라이버
- IR 적외선 키트(IR 컨트롤러 및 IR 수신기 포함)
이 페이지 상단에 있는 하드웨어 목록을 확인하세요.
작동 원리
- 아두이노 나노 ESP32는 L298N 모터 드라이버 모듈을 통해 로봇 자동차의 DC 모터에 연결됩니다.
- 아두이노 나노 ESP32는 IR 수신기에 연결합니다.
- 배터리는 ESP32, DC 모터, 모터 드라이버 및 IR 수신기에 전력을 공급합니다.
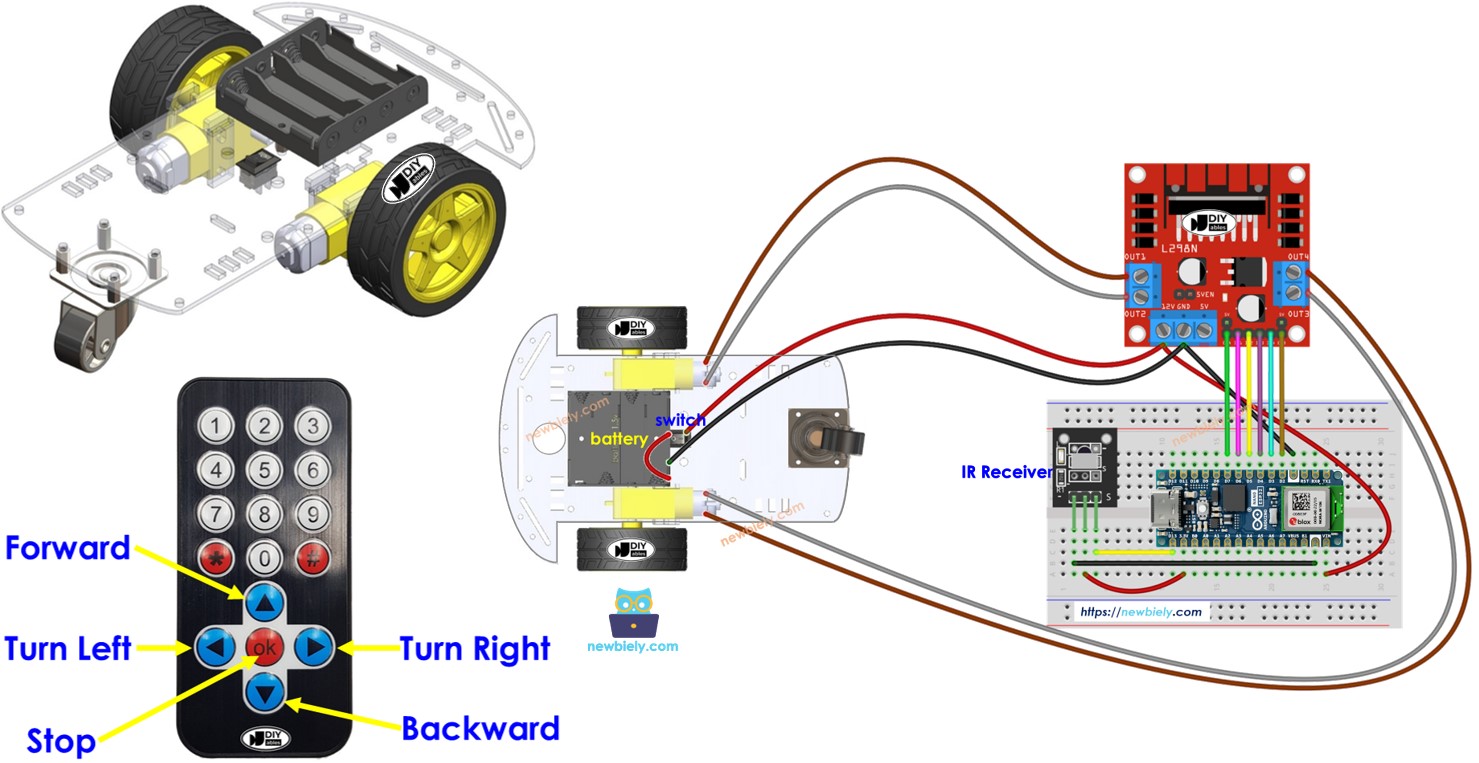
- 사용자는 IR 리모컨의 상/하/좌/우/확인 키를 누릅니다.
- 아두이노 나노 ESP32는 IR 수신기를 통해 상/하/좌/우/확인 명령을 받습니다.
- 아두이노 나노 ESP32는 모터 드라이버를 통해 DC 모터를 제어하여 자동차가 앞으로/뒤로/왼쪽/오른쪽/정지하도록 제어합니다.
선연결
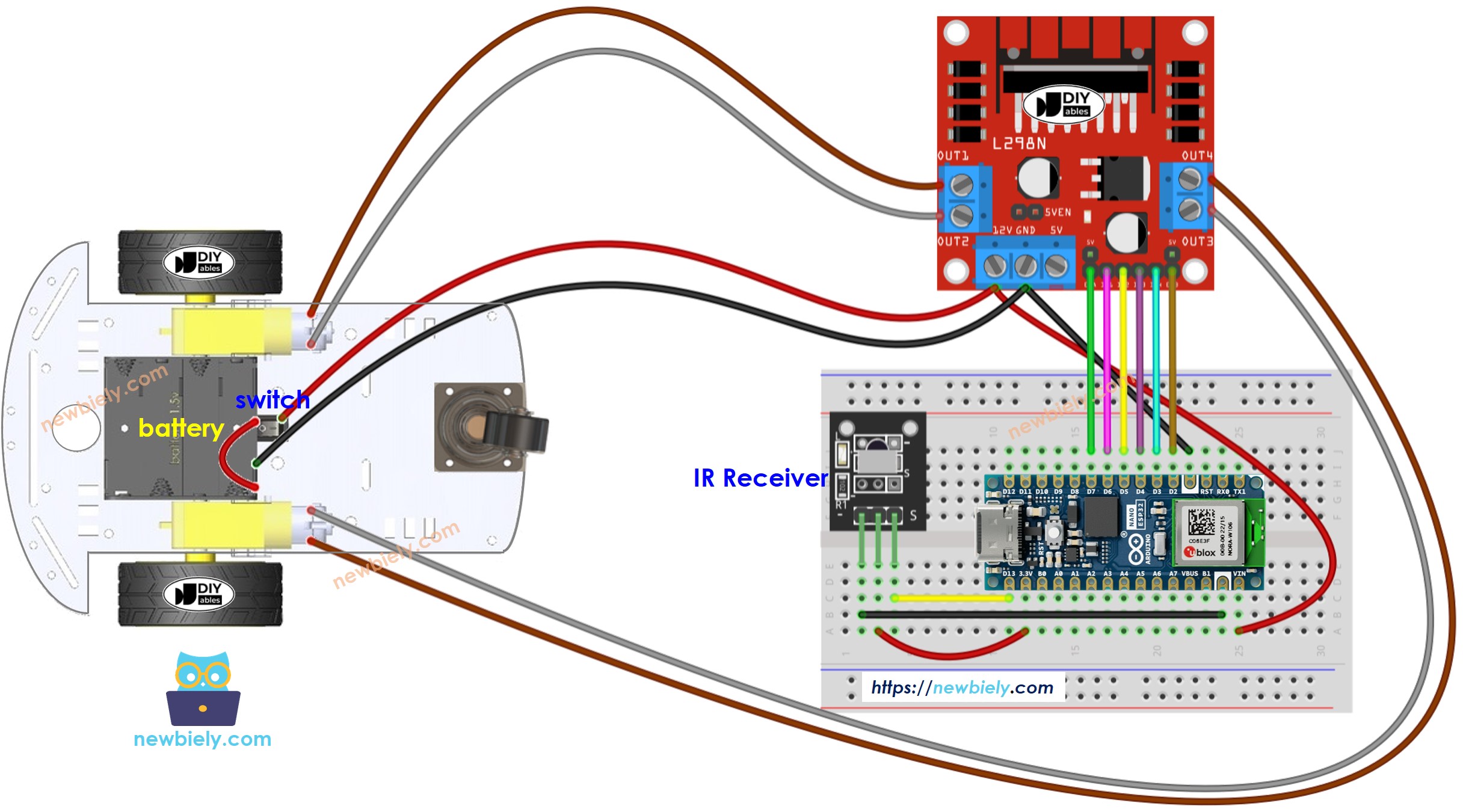
이 이미지는 Fritzing을 사용하여 만들어졌습니다. 이미지를 확대하려면 클릭하세요.
보통 두 가지의 전력원이 필요합니다:
- 모터용 하나는 간접적으로 L298N 모듈을 통해서입니다.
- 다른 하나는 Arduino Nano ESP32 보드, L298N 모듈, 그리고 IR 수신기를 위한 것입니다.
그러나, 이것을 단 하나의 전원 소스만 사용하여 간소화하는 방법이 있습니다. 네 개의 1.5V 배터리(총 6V)를 사용하여 이를 달성할 수 있습니다. 여기 그 방법이 있습니다:
다이어그램에 표시된 대로 L298N 모듈에 배터리를 연결하세요.
L298N 모듈에서 ENA와 ENB 핀을 5볼트에 연결하는 두 개의 점퍼를 제거하세요.
다이어그램에서 노란색 원으로 표시된 5VEN이라고 표시된 점퍼를 배치하세요.
L298N 모듈의 나사 단자에 있는 12V 핀을 Arduino Nano ESP32 보드의 Vin 핀에 연결하세요. 이것은 배터리(6V)로부터 직접 Arduino Nano ESP32에 전력을 제공합니다.
아두이노 나노 ESP32 코드
사용 방법
- Arduino Nano ESP32를 처음 사용하는 경우, 아두이노 나노 ESP32 - 소프트웨어 설치을 확인하세요.
- 이 지침을 따라 Arduino IDE에 DIYables_IRcontroller 라이브러리를 설치하세요.
- 위에 표시된 다이어그램대로 배선을 하세요.
- 코드를 업로드할 때 USB 케이블을 통해 Arduino Nano ESP32에 전력을 공급할 예정이므로 ESP32의 Vin에서 전선을 분리하세요.
- 바퀴가 위로 오게 하려면 자동차를 뒤집으세요.
- Arduino Nano ESP32 보드를 USB 케이블을 통해 PC에 연결하세요.
- PC에서 Arduino IDE를 엽니다.
- 올바른 Arduino Nano ESP32 보드(예: Arduino Nano ESP32와 COM 포트를 선택하세요.
- 제공된 코드를 복사하여 Arduino IDE에서 엽니다.
- Arduino IDE에서 Upload 버튼을 클릭하여 코드를 Arduino Nano ESP32로 전송하세요.
- IR 리모컨을 사용하여 자동차를 전진, 후진, 왼쪽, 오른쪽 또는 정지하게 하세요.
- 바퀴가 명령에 따라 올바르게 움직이는지 확인하세요.
- 바퀴가 잘못된 방향으로 움직이면, L298N 모듈의 DC 모터의 전선을 서로 바꿔 연결하세요.
- Arduino IDE의 시리얼 모니터에서 결과도 확인할 수 있습니다.
- 모든 것이 잘 진행되고 있다면, ESP32에서 USB 케이블을 뽑은 후 선을 다시 Vin 5V 핀에 연결하세요. 이를 통해 배터리에서 Arduino Nano ESP32에 전원을 공급하게 됩니다.
- 자동차를 바퀴가 땅에 닿게 정상 위치로 뒤집으세요.
- 자동차를 컨트롤하는 것을 즐기세요!
코드 설명
위의 아두이노 코드의 주석 라인에서 설명을 찾을 수 있습니다.
다음 튜토리얼을 확인하여 코드에 대해 더 알아볼 수 있습니다:
이 프로젝트를 다음 방법으로 확장할 수 있습니다:
- 장애물 감지 시 즉시 차량을 정지시키는 장애물 회피 센서 추가.
- 차량 속도를 제어하는 기능 추가 (Arduino Nano ESP32 - DC 모터 [BASE_URL/tutorials/arduino-nano-esp32/arduino-nano-esp32-dc-motor] 튜토리얼 참조). 제공된 코드는 차량을 전속력으로 제어합니다.
동영상
비디오 제작은 시간이 많이 걸리는 작업입니다. 비디오 튜토리얼이 학습에 도움이 되었다면, YouTube 채널 을 구독하여 알려 주시기 바랍니다. 비디오에 대한 높은 수요가 있다면, 비디오를 만들기 위해 노력하겠습니다.



