아두이노 나노 ESP32 GPS
이 가이드에서는 NEO-6M GPS 모듈에서 GPS 좌표(경도, 위도, 고도), GPS 속도(시간당 킬로미터), 그리고 날짜-시간 정보를 추출하는 방법을 알아보겠습니다. 또한, 현재 GPS 위치와 사전 정의된 GPS 좌표(예: 런던의 좌표) 사이의 거리를 계산하는 과정도 탐구할 것입니다.
1 × 아두이노 나노 ESP32 쿠팡 | 아마존 1 × USB 케이블 타입-A to 타입-C (USB-A PC용) 쿠팡 | 아마존 1 × USB 케이블 타입-C to 타입-C (USB-C PC용) 아마존 1 × NEO-6M GPS module 아마존 1 × 점퍼케이블 쿠팡 | 아마존 1 × 브레드보드 쿠팡 | 아마존 1 × (추천 ) 아두이노 나노용 스크루 터미널 확장 보드 쿠팡 | 아마존 1 × (추천 ) 아두이노 나노용 브레이크아웃 확장 보드 쿠팡 | 아마존 1 × (추천 ) 아두이노 나노 ESP32용 전원 분배기 쿠팡 | 아마존
공개: 이 포스팅 에 제공된 일부 링크는 아마존 제휴 링크입니다. 이 포스팅은 쿠팡 파트너스 활동의 일환으로, 이에 따른 일정액의 수수료를 제공받습니다.
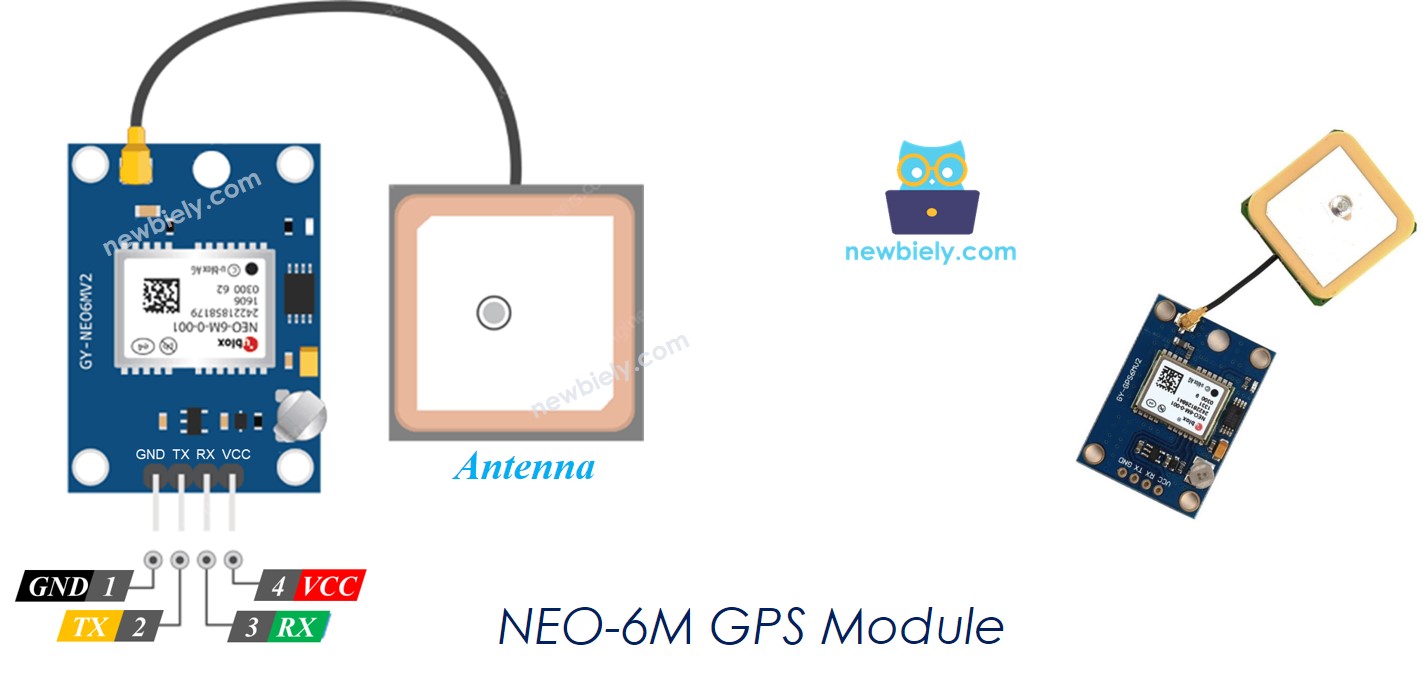
NEO-6M GPS 모듈에는 4개의 핀이 있습니다:
VCC 핀: VCC (3.3V 또는 5V)에 연결해야 합니다.
GND 핀: GND (0V)에 연결해야 합니다.
TX 핀: GPS 모듈과 ESP32 간의 통신에 사용되며, Arduino Nano ESP32의 Serial RX 핀에 연결해야 합니다.
RX 핀: GPS 모듈과 ESP32 간의 통신에 사용되며, Arduino Nano ESP32의 Serial TX 핀에 연결해야 합니다.
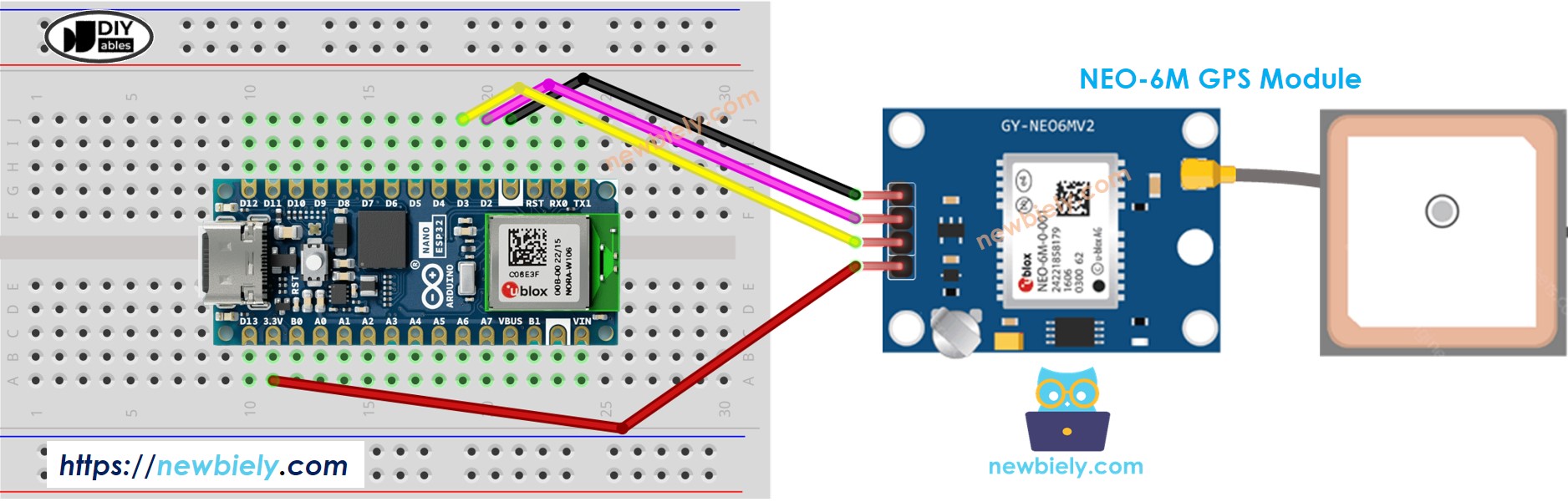
이 이미지는 Fritzing 을 사용하여 만들어졌습니다. 이미지를 확대하려면 클릭하세요.
#include <TinyGPS++.h>
#define RX1PIN D2
#define TX1PIN D3
TinyGPSPlus gps;
void setup () { Serial .begin (9600);
Serial1 .begin (9600, SERIAL_8N1, RX1PIN, TX1PIN);
Serial .println (F ("Arduino - GPS module" ));
}
void loop () { if (Serial1 .available () > 0) {
if (gps.encode(Serial1 .read ())) {
if (gps.location.isValid ()) {
Serial .print (F ("- latitude: " ));
Serial .println (gps.location.lat());
Serial .print (F ("- longitude: " ));
Serial .println (gps.location.lng());
Serial .print (F ("- altitude: " ));
if (gps.altitude.isValid ())
Serial .println (gps.altitude.meters());
else
Serial .println (F ("INVALID" ));
} else {
Serial .println (F ("- location: INVALID" ));
}
Serial .print (F ("- speed: " ));
if (gps.speed .isValid ()) {
Serial .print (gps.speed .kmph());
Serial .println (F (" km/h" ));
} else {
Serial .println (F ("INVALID" ));
}
Serial .print (F ("- GPS date&time: " ));
if (gps.date .isValid () && gps.time.isValid ()) {
Serial .print (gps.date .year ());
Serial .print (F ("-" ));
Serial .print (gps.date .month ());
Serial .print (F ("-" ));
Serial .print (gps.date .day ());
Serial .print (F (" " ));
Serial .print (gps.time.hour ());
Serial .print (F (":" ));
Serial .print (gps.time.minute ());
Serial .print (F (":" ));
Serial .println (gps.time.second ());
} else {
Serial .println (F ("INVALID" ));
}
Serial .println ();
}
}
if (millis () > 5000 && gps.charsProcessed() < 10)
Serial .println (F ("No GPS data received: check wiring" ));
}
아두이노 나노 ESP32를 시작하는 방법은 다음과 같습니다:
아두이노 나노 ESP32에 처음이라면, 아두이노 나노 ESP32 - 소프트웨어 설치 에 대한 튜토리얼을 참조하세요.
제공된 다이어그램에 따라 구성 요소를 연결하십시오.
아두이노 나노 ESP32 보드를 USB 케이블을 사용하여 컴퓨터에 연결하십시오.
컴퓨터에서 아두이노 IDE를 실행하십시오.
Arduino Nano ESP32 보드와 해당 COM 포트를 선택하십시오.
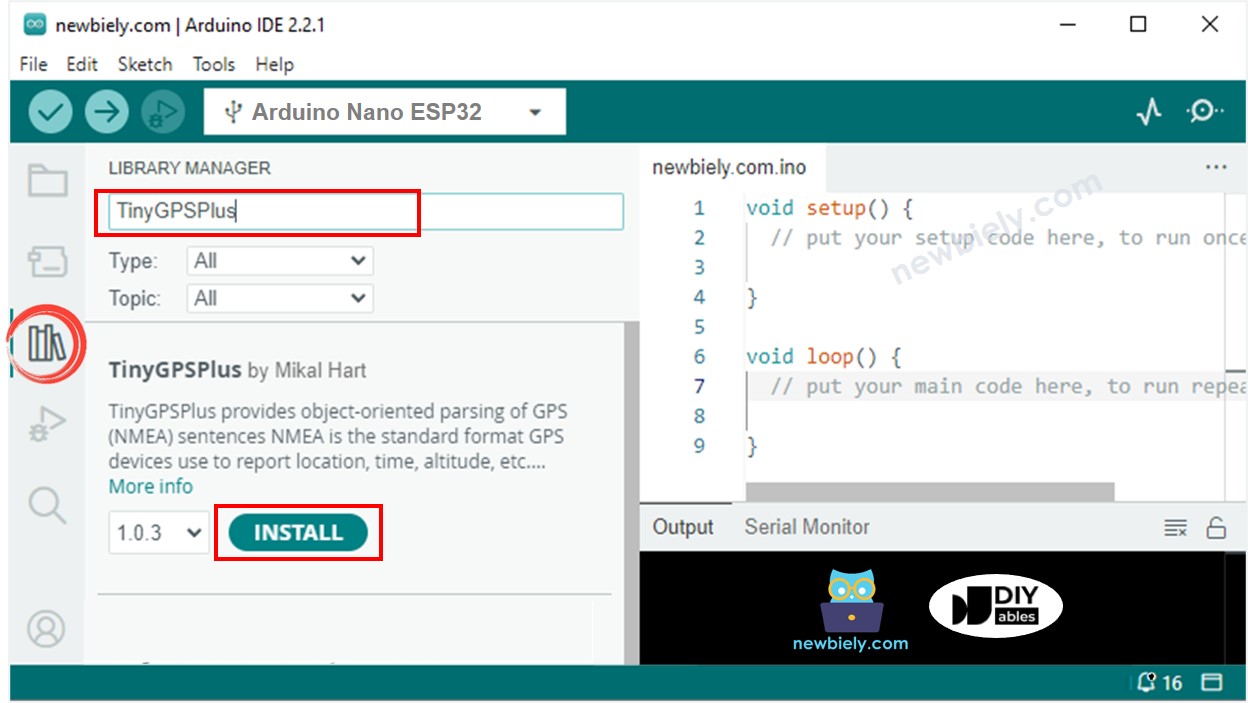
아두이노 IDE의 왼쪽 바에 있는 Libraries 아이콘을 클릭하십시오.
"TinyGPSPlus" 를 검색한 다음, Mikal Hart가 만든 TinyGPSPlus 라이브러리를 찾으십시오.
Install 버튼을 클릭하여 TinyGPSPlus 라이브러리를 설치하십시오.
위의 코드를 복사하고 Arduino IDE로 열기
Arduino IDE에서 Upload 버튼을 클릭하여 코드를 Arduino Nano ESP32에 업로드하세요
시리얼 모니터에서 결과를 확인하세요:
∞
Newbiely | Arduino IDE 2.3.8
8
Serial .println ("Hello World!" );
Message (Enter to send message to 'Arduino Nano ESP32' on 'COM15')
Ln 11, Col 1
Arduino Nano ESP32 on COM15
2
아래 코드는 현재 위치와 런던(위도: 51.508131, 경도: -0.128002) 사이의 거리를 계산합니다.
#include <TinyGPS++.h>
#define RX1PIN D2
#define TX1PIN D3
TinyGPSPlus gps;
const double LONDON_LAT = 51.508131;const double LONDON_LON = -0.128002;void setup () { Serial .begin (9600);
Serial1 .begin (9600, SERIAL_8N1, RX1PIN, TX1PIN);
Serial .println (F ("Arduino - GPS module" ));
}
void loop () { if (Serial1 .available () > 0) {
if (gps.encode(Serial1 .read ())) {
if (gps.location.isValid ()) {
double latitude = gps.location.lat();
double longitude = gps.location.lng();
unsigned long distanceKm = TinyGPSPlus::distanceBetween(latitude, longitude, LONDON_LAT, LONDON_LON) / 1000;
Serial .print (F ("- latitude: " ));
Serial .println (latitude);
Serial .print (F ("- longitude: " ));
Serial .println (longitude);
Serial .print (F ("- distance to London: " ));
Serial .println (distanceKm);
} else {
Serial .println (F ("- location: INVALID" ));
}
Serial .println ();
}
}
if (millis () > 5000 && gps.charsProcessed() < 10)
Serial .println (F ("No GPS data received: check wiring" ));
}
∞
Newbiely | Arduino IDE 2.3.8
8
Serial .println ("Hello World!" );
Message (Enter to send message to 'Arduino Nano ESP32' on 'COM15')
Ln 11, Col 1
Arduino Nano ESP32 on COM15
2
비디오 제작은 시간이 많이 걸리는 작업입니다. 비디오 튜토리얼이 학습에 도움이 되었다면, YouTube 채널 을 구독하여 알려 주시기 바랍니다. 비디오에 대한 높은 수요가 있다면, 비디오를 만들기 위해 노력하겠습니다.