아두이노 나노 ESP32 조이스틱 서보 모터
이 튜토리얼에서는 조이스틱을 사용하여 두 개의 서보 모터 또는 서보가 있는 팬-틸트 키트를 제어하는 방법을 배우기 위해 아두이노 나노 ESP32를 사용하는 방법을 배울 예정입니다.
조이스틱에는 서로 직각을 이루는 두 개의 내장된 전위차계(가로축과 세로축으로 불림)가 있습니다. 이 전위차계들은 VRX 및 VRY 핀에서 아날로그 값을(가로값과 세로값으로 불림) 출력합니다. 우리는 이 아날로그 값을 사용하여 두 개의 서보 모터를 독립적으로 제어할 것입니다: 가로값은 서보 #1을 제어하고 세로값은 서보 #2를 제어합니다. 팬-틸트 키트의 경우, 두 서보 모터의 움직임이 3차원 움직임을 만들어냅니다.
두 가지 애플리케이션 사용 사례가 있습니다:
사용 사례 1: 조이스틱의 엄지 조작에 따라 서보 모터가 회전합니다:
- 서보 모터의 각도는 조이스틱의 X값과 Y값에 비례합니다.
- 조이스틱의 엄지를 놓으면 ⇒ 모든 값이 중앙 값으로 돌아가고 ⇒ 서보 모터가 자동으로 중앙 위치로 돌아갑니다
사용 사례 2: 조이스틱을 사용하여 서보 모터 제어하기 (위/아래/왼쪽/오른쪽 명령)
- 조이스틱의 엄지를 왼쪽으로 밀면, 서보 모터 #1을 시계 방향으로 단계별로 이동
- 조이스틱의 엄지를 오른쪽으로 밀면, 서보 모터 #1을 반시계 방향으로 단계별로 이동
- 조이스틱의 엄지를 위로 밀면, 서보 모터 #2를 시계 방향으로 단계별로 이동
- 조이스틱의 엄지를 아래로 밀면, 서보 모터 #2를 반시계 방향으로 단계별로 이동
- 조이스틱의 엄지를 놓으면 ⇒ 서보 모터는 중앙 위치로 돌아가지 않습니다
- 조이스틱을 누르면 (버튼을 누름), 서보 모터가 중앙 위치로 돌아갑니다
우리는 다음 파트에서 두 가지 사용 사례에 대한 코드를 탐색할 것입니다.
준비물
| 1 | × | 아두이노 나노 ESP32 | 쿠팡 | 아마존 | |
| 1 | × | USB 케이블 타입-A to 타입-C (USB-A PC용) | 쿠팡 | 아마존 | |
| 1 | × | USB 케이블 타입-C to 타입-C (USB-C PC용) | 아마존 | |
| 1 | × | 조이스틱 (Joystick) | 쿠팡 | 아마존 | |
| 2 | × | 서보 모터 | 쿠팡 | 아마존 | |
| 2 | × | (추천) 서보 모터가 포함된 팬 틸트 키트 | 아마존 | |
| 1 | × | 브레드보드 | 쿠팡 | 아마존 | |
| 1 | × | 점퍼케이블 | 쿠팡 | 아마존 | |
| 1 | × | (옵션) DC 커넥터 전원 연결 잭 플러그 소켓 | 쿠팡 | 아마존 | |
| 1 | × | (추천) 아두이노 나노용 스크루 터미널 확장 보드 | 쿠팡 | 아마존 | |
| 1 | × | (추천) 아두이노 나노용 브레이크아웃 확장 보드 | 쿠팡 | 아마존 | |
| 1 | × | (추천) 아두이노 나노 ESP32용 전원 분배기 | 쿠팡 | 아마존 |
조이스틱과 서보 모터에 대하여
조이스틱과 서보 모터(핀 배치, 작동 방식, 프로그래밍 방법 등)에 대해 잘 모른다면, 다음 튜토리얼에서 배워보세요:
선연결
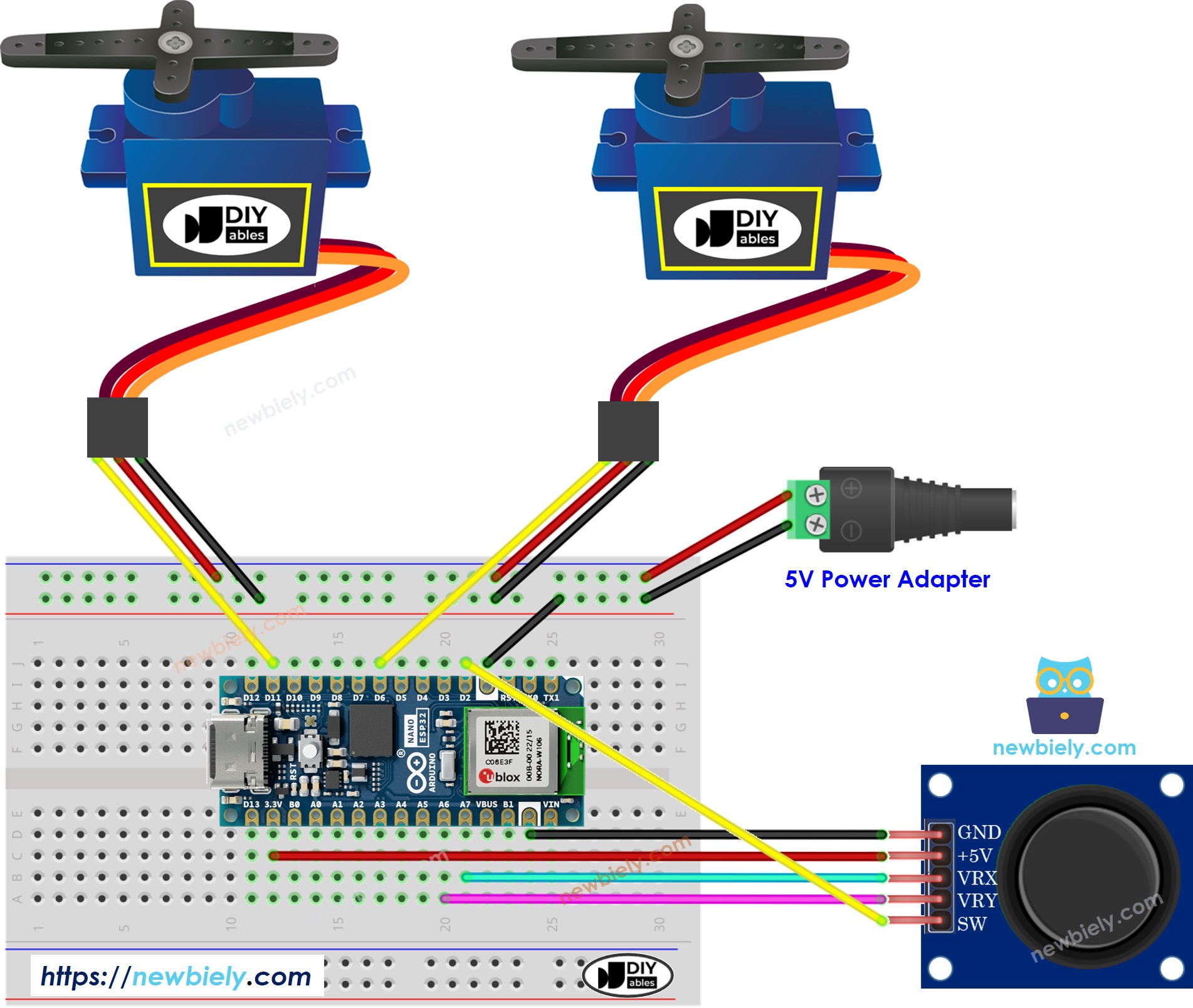
이 이미지는 Fritzing을 사용하여 만들어졌습니다. 이미지를 확대하려면 클릭하세요.
아두이노 나노 ESP32 코드
아두이노 나노 ESP32 코드 - 조이스틱의 엄지 움직임에 따라 서보 모터가 회전합니다
사용 방법
Arduino Nano ESP32를 시작하는 방법은 다음과 같습니다:
- 아두이노 나노 ESP32가 처음이라면, 아두이노 IDE에서 아두이노 나노 ESP32 환경 설정 방법에 대한 튜토리얼을 참조하세요 [BASE_URL/tutorials/arduino-nano-esp32/arduino-nano-esp32-software-installation].
- 제공된 다이어그램에 따라 구성 요소를 연결하세요.
- USB 케이블을 사용하여 아두이노 나노 ESP32 보드를 컴퓨터에 연결하세요.
- 컴퓨터에서 아두이노 IDE를 실행하세요.
- Arduino Nano ESP32 보드와 해당 COM 포트를 선택하세요.
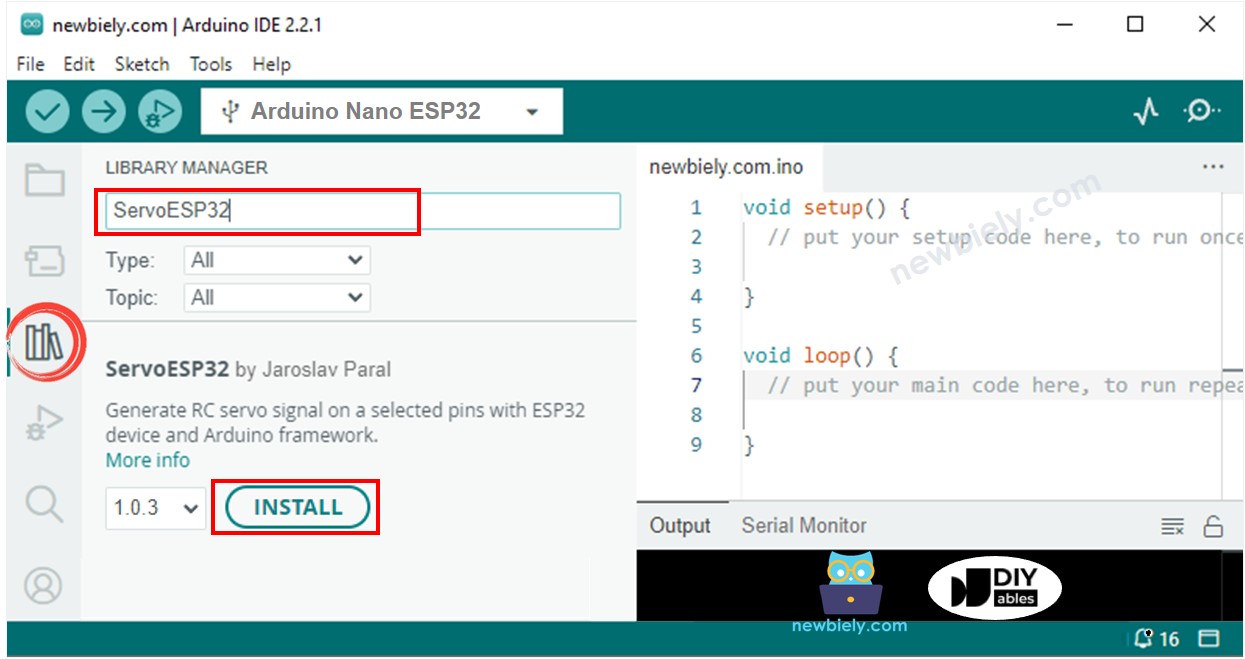
- 아두이노 IDE의 왼쪽 바에서 Libraries 아이콘을 클릭하세요.
- 검색 상자에 ESP32Servo를 입력한 다음, Kevin Harrington,John K. Bennett.
- 아두이노 나노 ESP32용 서보 모터 라이브러리를 설치하려면 Install 버튼을 클릭하세요.
- 위의 코드를 복사하고 Arduino IDE로 열기
- Arduino IDE에서 Upload 버튼을 클릭하여 Arduino Nano ESP32에 코드를 업로드하세요

- 시리얼 모니터 열기
- 조이스틱을 어떤 방향으로 밀기
- 서보 모터의 회전을 보기
- 시리얼 모니터에 결과 보기
아두이노 나노 ESP32 코드 - 조이스틱을 사용하여 서보 모터를 제어하세요
사용 방법
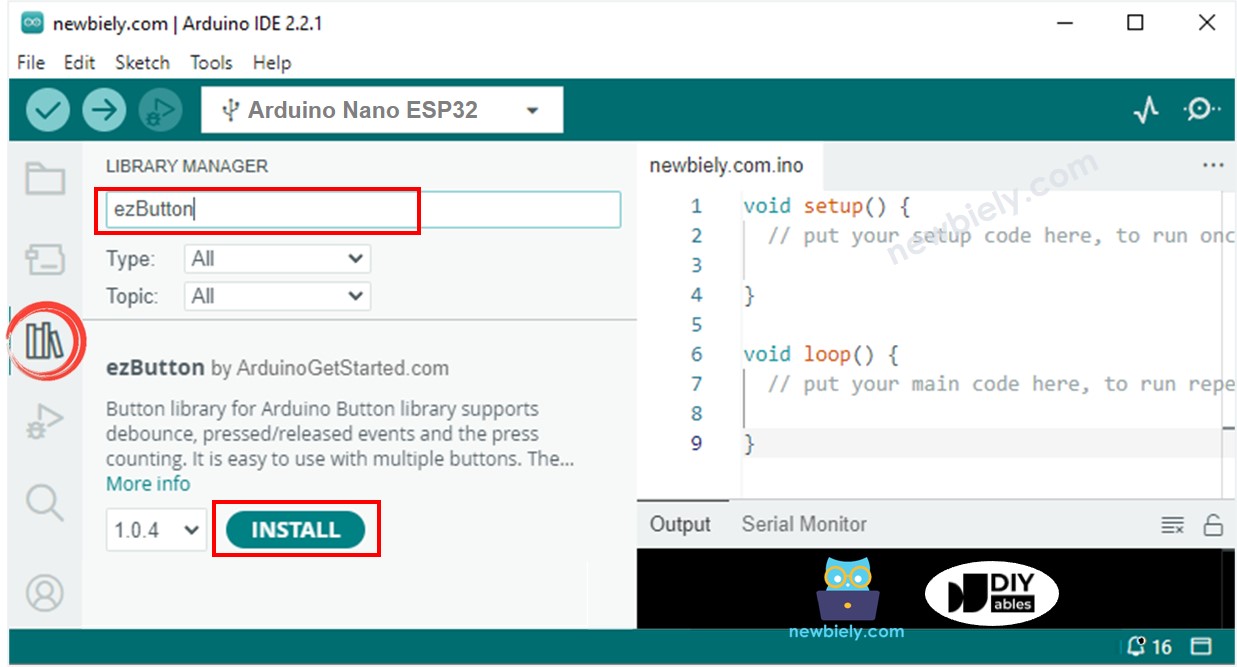
- Arduino IDE의 왼쪽 탐색 바에 있는 Library Manager 아이콘을 클릭하여 라이브러리 관리자를 엽니다.
- “ezButton”을 검색한 다음, ArduinoGetStarted.com에 의한 버튼 라이브러리를 찾습니다.
- EzButton 라이브러리를 설치하려면 Install 버튼을 클릭합니다.
- 위의 코드를 복사하고 Arduino IDE로 열기
- Arduino IDE에서 Upload 버튼을 클릭하여 코드를 Arduino Nano ESP32에 업로드
- 시리얼 모니터 열기
- 조이스틱을 어떤 방향으로 밀기
- 서보 모터의 회전을 보기
- 시리얼 모니터에서 결과 보기
코드 설명
소스 코드의 주석 줄에 있는 줄별 설명을 읽으세요!
동영상
비디오 제작은 시간이 많이 걸리는 작업입니다. 비디오 튜토리얼이 학습에 도움이 되었다면, YouTube 채널 을 구독하여 알려 주시기 바랍니다. 비디오에 대한 높은 수요가 있다면, 비디오를 만들기 위해 노력하겠습니다.



