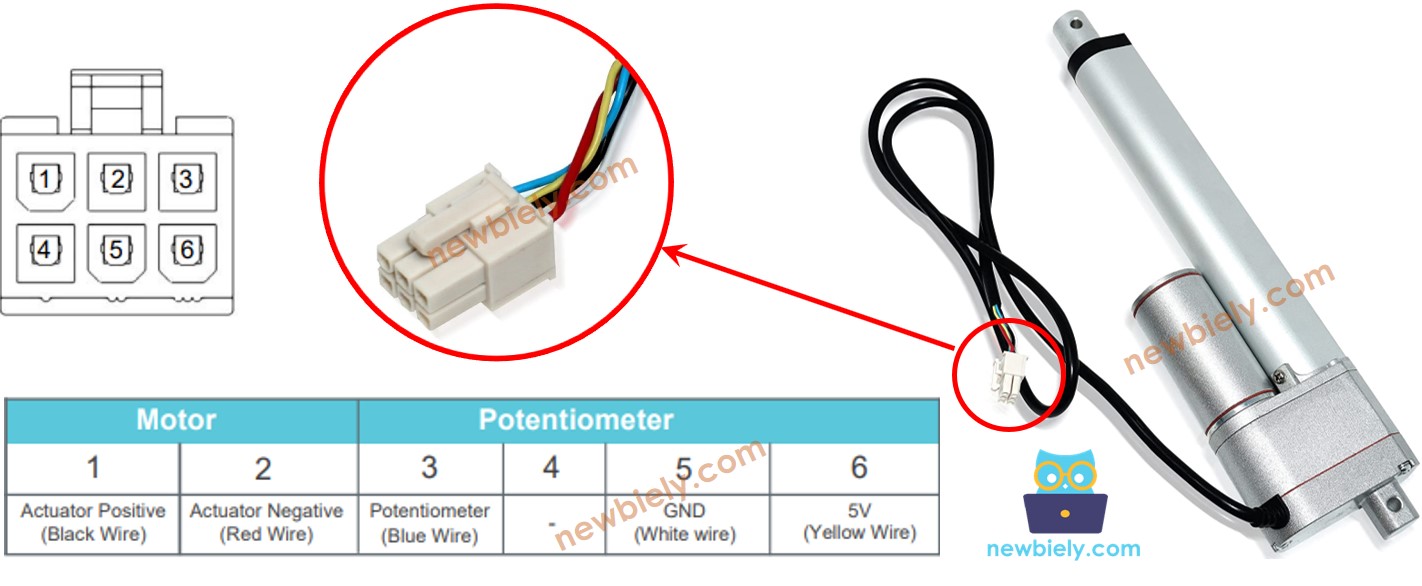
이전 튜토리얼에서 우리는 아두이노 나노 - 액추에이터에 대해 논의했습니다. 이제 우리는 피드백 리니어 액추에이터(또한 피드백 리니어 액추에이터로 알려짐)를 탐구할 것입니다. 이 유형의 액추에이터는 스트로크의 위치를 판단하는 정보를 제공한 다음 제어합니다. 구체적으로, 우리는 다음을 살펴볼 것입니다:
Arduino Nano와 기타 부품에 전원을 공급하는 가장 효과적인 방법은 다음 링크를 참조하세요: 아두이노 나노 전원 공급 방법.
선형 액추에이터를 확장/축소하는 방법
Arduino Nano - 액추에이터에 대한 튜토리얼을 확인해보세요: [BASE_URL/tutorials/arduino-nano/arduino-nano-actuator]
선형 액추에이터의 위치를 찾는 방법
이것은 선형 액추에이터에서 스트로크를 찾는 방법의 예입니다. 이 과정을 설명하는 도해를 제공합니다.
교정
작동기의 스트로크 길이(밀리미터 단위)를 자 ruler로 측정하거나 데이터시트를 참조하여 결정하십시오.
선형 작동기가 완전히 확장되고 완전히 축소되었을 때의 출력 값을 결정하기 위해 다음 코드를 실행하십시오.
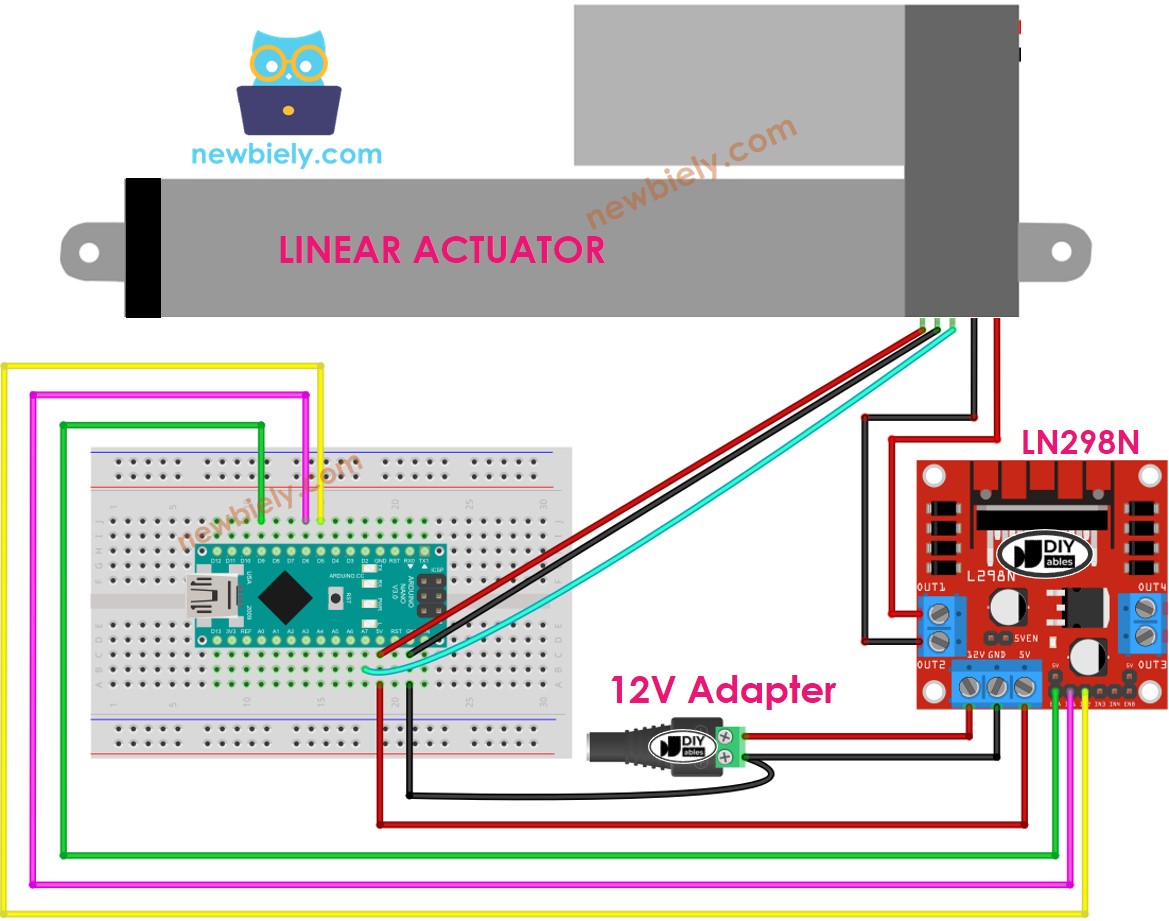
/* * 이 아두이노 나노 코드는 newbiely.kr 에서 개발되었습니다 * 이 아두이노 나노 코드는 어떠한 제한 없이 공개 사용을 위해 제공됩니다. * 상세한 지침 및 연결도에 대해서는 다음을 방문하세요: * https://newbiely.kr/tutorials/arduino-nano/arduino-nano-feedback-actuator */// 액츄에이터가 완전히 확장되고 축소될 때 피드백을 얻기 위한 코드#define ENA_PIN 7 // 아두이노 나노 핀이 L298N의 EN1 핀에 연결됨#define IN1_PIN 6 // 아두이노 나노 핀이 L298N의 IN1 핀에 연결됨#define IN2_PIN 5 // 아두이노 나노 핀이 L298N의 IN2 핀에 연결됨#define POTENTIOMETER_PIN A0 // 아두이노 나노 핀이 액츄에이터의 전위차계에 연결됨voidsetup() {Serial.begin(9600);// 디지털 핀을 출력으로 초기화합니다.pinMode(ENA_PIN, OUTPUT);pinMode(IN1_PIN, OUTPUT);pinMode(IN2_PIN, OUTPUT);digitalWrite(ENA_PIN, HIGH);}voidloop() {// 액츄에이터를 확장합니다.digitalWrite(IN1_PIN, HIGH);digitalWrite(IN2_PIN, LOW);delay(20000); // 액츄에이터가 완전히 확장될 때까지 기다립니다. 한계에 도달하면 자동으로 확장이 멈춥니다.// 아날로그 입력 값을 읽습니다:int POTENTIOMETER_MAX = analogRead(POTENTIOMETER_PIN);Serial.print("POTENTIOMETER_MAX = ");Serial.println(POTENTIOMETER_MAX);// 액츄에이터를 축소합니다.digitalWrite(IN1_PIN, LOW);digitalWrite(IN2_PIN, HIGH);delay(20000); // 액츄에이터가 완전히 축소될 때까지 기다립니다. 한계에 도달하면 자동으로 축소가 멈춥니다.int POTENTIOMETER_MIN = analogRead(POTENTIOMETER_PIN);Serial.print("POTENTIOMETER_MIN = ");Serial.println(POTENTIOMETER_MIN);}
아래 예시에 따라 시리얼 모니터에서 로그를 관찰하세요.
Newbiely | Arduino IDE 2.3.8
──
☐
✕
File
Edit
Sketch
Tools
Help
Arduino Nano
Newbiely.ino
···
8Serial.println("Hello World!");
Output
Serial Monitor
Message (Enter to send message to 'Arduino Nano' on 'COM15')
New Line
9600 baud
POTENTIOMETER_MAX = 987
POTENTIOMETER_MIN = 13
Ln 11, Col 1
Arduino Nano on COM15
2
다음 세 가지 값을 기록하고 아래 코드에 업데이트하십시오: 최소값, 최대값 및 IN1_PIN과 IN2_PIN. 최소값과 최대값이 바뀐 경우 IN1_PIN과 IN2_PIN도 교환하십시오.
액추에이터의 위치를 계산하는 아두이노 나노 코드
/* * 이 아두이노 나노 코드는 newbiely.kr 에서 개발되었습니다 * 이 아두이노 나노 코드는 어떠한 제한 없이 공개 사용을 위해 제공됩니다. * 상세한 지침 및 연결도에 대해서는 다음을 방문하세요: * https://newbiely.kr/tutorials/arduino-nano/arduino-nano-feedback-actuator */#define ENA_PIN 7 // Arduino Nano의 EN1 핀에 연결된 핀#define IN1_PIN 6 // Arduino Nano의 IN1 핀에 연결된 핀#define IN2_PIN 5 // Arduino Nano의 IN2 핀에 연결된 핀#define POTENTIOMETER_PIN A0 // 액츄에이터의 포텐쇼미터에 연결된 Arduino Nano 핀#define STROKE_LENGTH 102 // 이 값을 업데이트 해주세요 (밀리미터 단위)#define POTENTIOMETER_MAX 987 // 이 값을 업데이트 해주세요#define POTENTIOMETER_MIN 13 // 이 값을 업데이트 해주세요voidsetup() {Serial.begin(9600);// 디지털 핀을 출력으로 초기화합니다.pinMode(ENA_PIN, OUTPUT);pinMode(IN1_PIN, OUTPUT);pinMode(IN2_PIN, OUTPUT);digitalWrite(ENA_PIN, HIGH);}voidloop() {// 액츄에이터를 확장합니다digitalWrite(IN1_PIN, HIGH);digitalWrite(IN2_PIN, LOW);int potentiometer_value = analogRead(POTENTIOMETER_PIN);int stroke_pos = map(potentiometer_value, POTENTIOMETER_MIN, POTENTIOMETER_MAX, 0, STROKE_LENGTH);Serial.print("스트로크 위치 = ");Serial.print(stroke_pos);Serial.println(" mm");}
코드에서 교정된 세 가지 값을 새로 고치세요.
코드를 Arduino Nano로 전송하세요.
시리얼 모니터에서 결과를 확인하세요.
Newbiely | Arduino IDE 2.3.8
──
☐
✕
File
Edit
Sketch
Tools
Help
Arduino Nano
Newbiely.ino
···
8Serial.println("Hello World!");
Output
Serial Monitor
Message (Enter to send message to 'Arduino Nano' on 'COM15')
New Line
9600 baud
The stroke's position = 2 mm
The stroke's position = 35 mm
The stroke's position = 43 mm
The stroke's position = 60 mm
The stroke's position = 68 mm
The stroke's position = 79 mm
The stroke's position = 83 mm
The stroke's position = 96 mm
The stroke's position = 100 mm
Ln 11, Col 1
Arduino Nano on COM15
2
특정 위치로 리니어 액추에이터를 제어하는 방법
/* * 이 아두이노 나노 코드는 newbiely.kr 에서 개발되었습니다 * 이 아두이노 나노 코드는 어떠한 제한 없이 공개 사용을 위해 제공됩니다. * 상세한 지침 및 연결도에 대해서는 다음을 방문하세요: * https://newbiely.kr/tutorials/arduino-nano/arduino-nano-feedback-actuator */#define ENA_PIN 7 // Arduino Nano의 EN1핀에 연결된 핀#define IN1_PIN 6 // Arduino Nano의 IN1핀에 연결된 핀#define IN2_PIN 5 // Arduino Nano의 IN2핀에 연결된 핀#define POTENTIOMETER_PIN A0 // 액추에이터의 가변 저항에 연결된 Arduino Nano 핀#define STROKE_LENGTH 102 // 이 값을 업데이트 해주세요 (밀리미터 단위)#define POTENTIOMETER_MAX 987 // 이 값을 업데이트 해주세요#define POTENTIOMETER_MIN 13 // 이 값을 업데이트 해주세요#define TOLERANCE 5 // 밀리미터 단위int targetPosition_mm = 50; // 밀리미터 단위voidsetup() {Serial.begin(9600);// 디지털 핀을 출력으로 초기화합니다. pinMode(ENA_PIN, OUTPUT); pinMode(IN1_PIN, OUTPUT); pinMode(IN2_PIN, OUTPUT); digitalWrite(ENA_PIN, HIGH);}void loop() { int potentiometer_value = analogRead(POTENTIOMETER_PIN); int stroke_pos = map(potentiometer_value, POTENTIOMETER_MIN, POTENTIOMETER_MAX, 0, STROKE_LENGTH); Serial.print("The stroke's position = "); Serial.print(stroke_pos); Serial.println(" mm"); if (stroke_pos < (targetPosition_mm - TOLERANCE)) ACTUATOR_extend(); else if (stroke_pos > (targetPosition_mm + TOLERANCE)) ACTUATOR_retract(); else ACTUATOR_stop();}void ACTUATOR_extend() { digitalWrite(IN1_PIN, HIGH); digitalWrite(IN2_PIN, LOW);}void ACTUATOR_retract() { digitalWrite(IN1_PIN, LOW); digitalWrite(IN2_PIN, HIGH);}void ACTUATOR_stop() { digitalWrite(IN1_PIN, LOW); digitalWrite(IN2_PIN, LOW);}
동영상
비디오 제작은 시간이 많이 걸리는 작업입니다. 비디오 튜토리얼이 학습에 도움이 되었다면, YouTube 채널 을 구독하여 알려 주시기 바랍니다. 비디오에 대한 높은 수요가 있다면, 비디오를 만들기 위해 노력하겠습니다.