아두이노 나노 로터리 엔코더
이 튜토리얼은 아두이노 나노와 로터리 인코더를 사용하는 방법을 지시합니다. 다룰 내용은 다음과 같습니다:
- 로터리 엔코더가 어떻게 작동하는지
- 로터리 엔코더와 포텐쇼미터(다른 유형의 노브)의 차이점
- 아두이노 나노에 로터리 엔코더를 연결하는 방법
- 로터리 엔코더에서 방향과 위치를 읽기 위해 아두이노 나노 코드를 작성하는 방법
준비물
| 1 | × | 아두이노 나노 | 쿠팡 | 아마존 | |
| 1 | × | USB A to Mini-B USB 케이블 | 쿠팡 | 아마존 | |
| 1 | × | 로터리 엔코더 (Rotary Encoder) | 쿠팡 | 아마존 | |
| 1 | × | 점퍼케이블 | 쿠팡 | 아마존 | |
| 1 | × | (추천) 아두이노 나노용 스크루 터미널 확장 보드 | 쿠팡 | 아마존 | |
| 1 | × | (추천) 아두이노 나노용 브레이크아웃 확장 보드 | 쿠팡 | 아마존 | |
| 1 | × | (추천) 아두이노 나노용 전원 분배기 | 쿠팡 | 아마존 |
로터리 엔코더 정보
회전하는 손잡이인 로터리 엔코더는 회전을 신호로 변환할 수 있습니다. 이것은 얼마나 많이 돌았는지와 그 위치를 나타냅니다. 주로 두 가지 종류가 있습니다:
- 증분형 인코더: 빠른 신호를 사용하여 얼마나 많이 움직였는지를 확인합니다.
- 절대 인코더: 이 유형은 각 위치마다 고유 코드를 제공하여, 전원이 꺼져도 어디에 있는지 정확히 파악할 수 있게 도와줍니다.
이 가이드는 증분 엔코더에 관한 모든 것입니다.
로터리 엔코더 모듈 핀배열

로터리 인코더 모듈에는 4개의 핀이 있습니다:
- CLK 핀 (출력 A): 회전이 얼마나 일어났는지 알려주는 주요 펄스입니다. 노브를 어느 방향으로든 한 딸깍 (클릭) 돌릴 때마다, CLK 핀은 전체 주기를 완료하는 신호 (LOW → HIGH → LOW)를 출력합니다.
- DT 핀 (출력 B): CLK 핀처럼 작동하지만 CLK 신호보다 90도 지연된 신호를 출력합니다. 이것은 회전 방향 (시계 방향 또는 반시계 방향)을 파악하는 데 도움이 됩니다.
- SW 핀: 인코더 안에 있는 푸시버튼에서 나오는 출력입니다. 보통 열려 있습니다. 이 핀에 풀업 저항을 사용한다면, 노브가 눌리지 않았을 때 SW 핀은 HIGH 상태가 되고, 눌렸을 때는 LOW 상태가 됩니다.
- VCC 핀 (+): VCC (3.3과 5 볼트 사이)에 연결해야 합니다.
- GND 핀: GND (0V)에 연결해야 합니다.
로터리 엔코더 대 비교 가변 저항기
회전 엔코더를 아두이노 나노 - 가변 저항기와 혼동할 수도 있지만, 이 두 부품은 서로 다릅니다. 다음은 이들 사이의 비교입니다:
- 로터리 엔코더는 모던 버전의 포텐쇼미터로 생각할 수 있지만, 더 많은 기능을 제공합니다.
- 로터리 엔코더는 멈추지 않고 전체 방향으로 회전할 수 있지만, 포텐쇼미터는 대략 3/4 정도만 회전할 수 있습니다.
- 로터리 엔코더는 펄스를 출력하는 반면, 포텐쇼미터는 아날로그 전압을 생성합니다.
- 손잡이가 얼마나 움직였는지만 알고 싶을 때, 정확한 위치를 지정하지 않고도, 로터리 엔코더는 편리합니다. 반면에, 손잡이의 정확한 위치를 알아야 할 때는 포텐쇼미터가 귀중합니다.
로터리 엔코더가 작동하는 방식
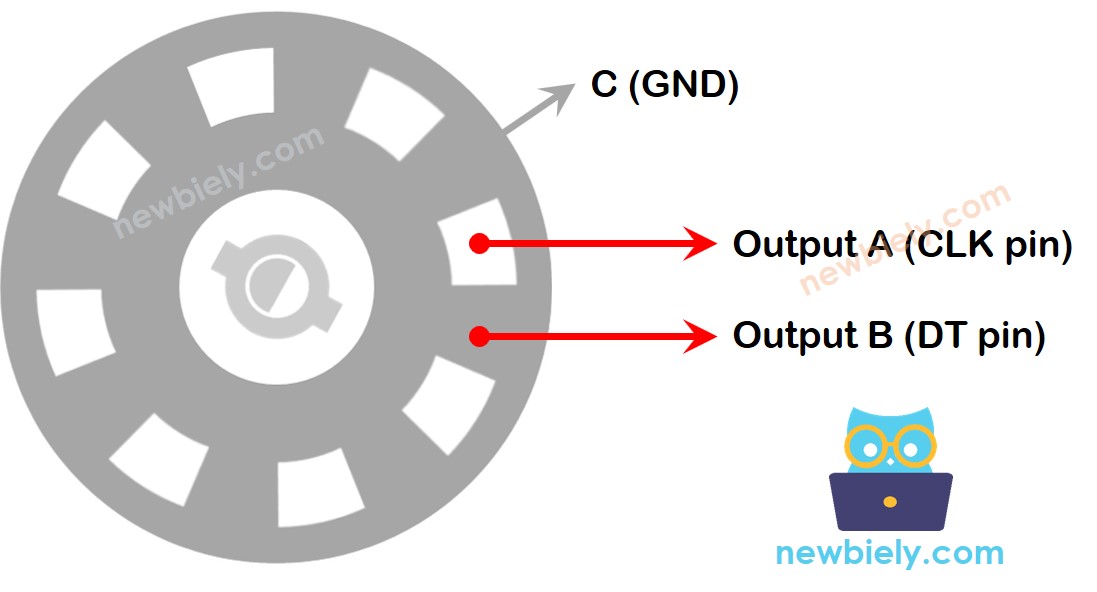
인코더 안에는 공통 접지처럼 작동하는 C라고 불리는 핀에 연결된 슬롯이 있는 디스크가 있습니다. A와 B라는 두 개의 핀이 더 있습니다.
- 노브를 돌릴 때, 핀 A와 B가 공통 접지핀 C와 접촉하지만, 노브를 돌리는 방향(시계 방향 또는 반시계 방향)에 따라 특정 순서로 접촉합니다.
- 이러한 접촉은 두 개의 신호를 생성합니다. 한 핀이 다른 핀보다 먼저 접지에 닿기 때문에 시간적으로 약간 다릅니다. 두 신호는 서로 90도 동기화가 안 맞습니다. 이것을 쿼드러처 인코딩이라고 합니다.
- 시계 방향으로 노브를 돌릴 때, 핀 A가 핀 B보다 먼저 접지에 닿습니다. 반시계 방향으로 노브를 돌릴 때는 핀 B가 핀 A보다 먼저 접지에 닿습니다.
- 각 핀이 접지에 닿거나 떨어지는 시기를 모니터링함으로써 우리는 노브가 어느 방향으로 돌아가는지 알아낼 수 있습니다. 이는 핀 A가 변할 때 핀 B에게 무슨 일이 일어나는지 확인함으로써 이루어집니다.
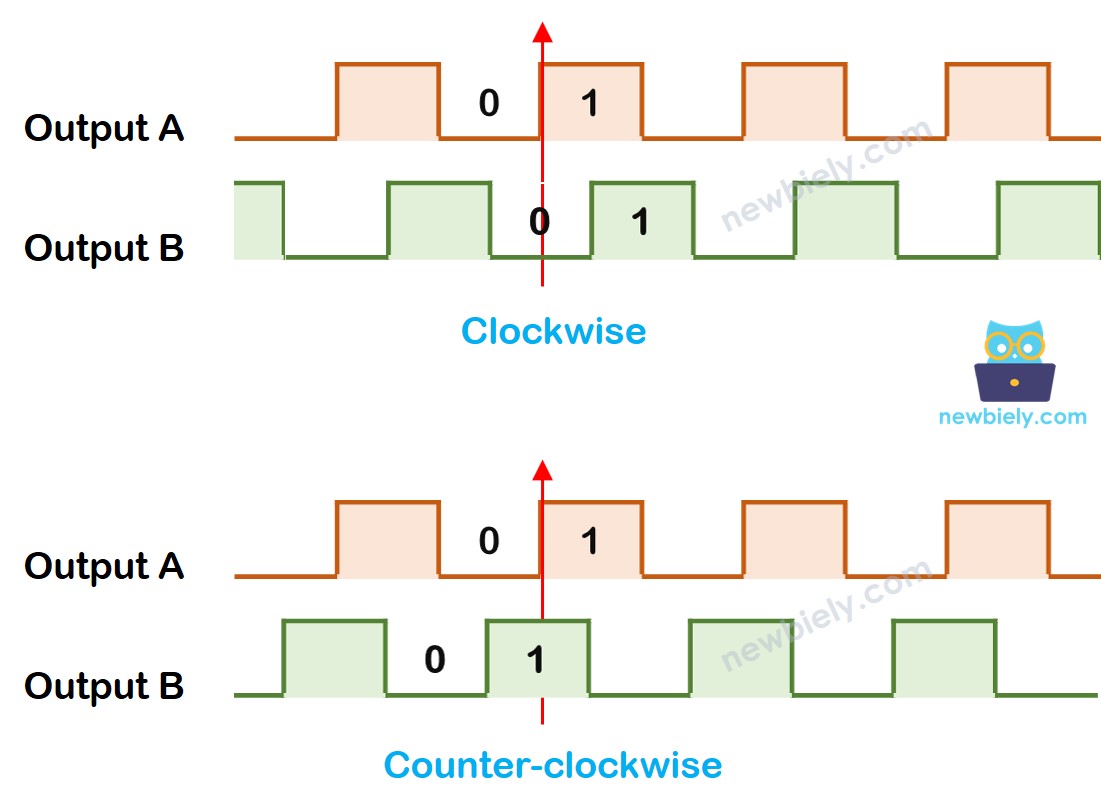
A가 LOW에서 HIGH로 상태가 변경될 때:
- B가 낮으면, 노브를 시계 방향으로 돌립니다.
- B가 높으면, 노브를 반시계 방향으로 돌립니다.
※ 주의:
A핀과 B핀은 CLK 및 DT 핀에 연결되어 있습니다. 그러나 제조업체에 따라 순서가 다를 수 있습니다. 아래 제공된 코드는 DIYables의 회전 엔코더와 함께 테스트되었습니다.
로터리 엔코더를 위한 프로그래밍 방법
- CLK 핀에서 신호를 확인하세요.
- 상태가 LOW에서 HIGH로 바뀌면 DT 핀의 상태를 확인하세요.
- DT 핀의 상태가 HIGH이면, 노브가 반시계 방향으로 돌아간 것이므로 카운터를 1만큼 증가시키세요.
- DT 핀의 상태가 LOW이면, 노브가 시계 방향으로 돌아간 것이므로 카운터를 1만큼 감소시키세요.
선연결
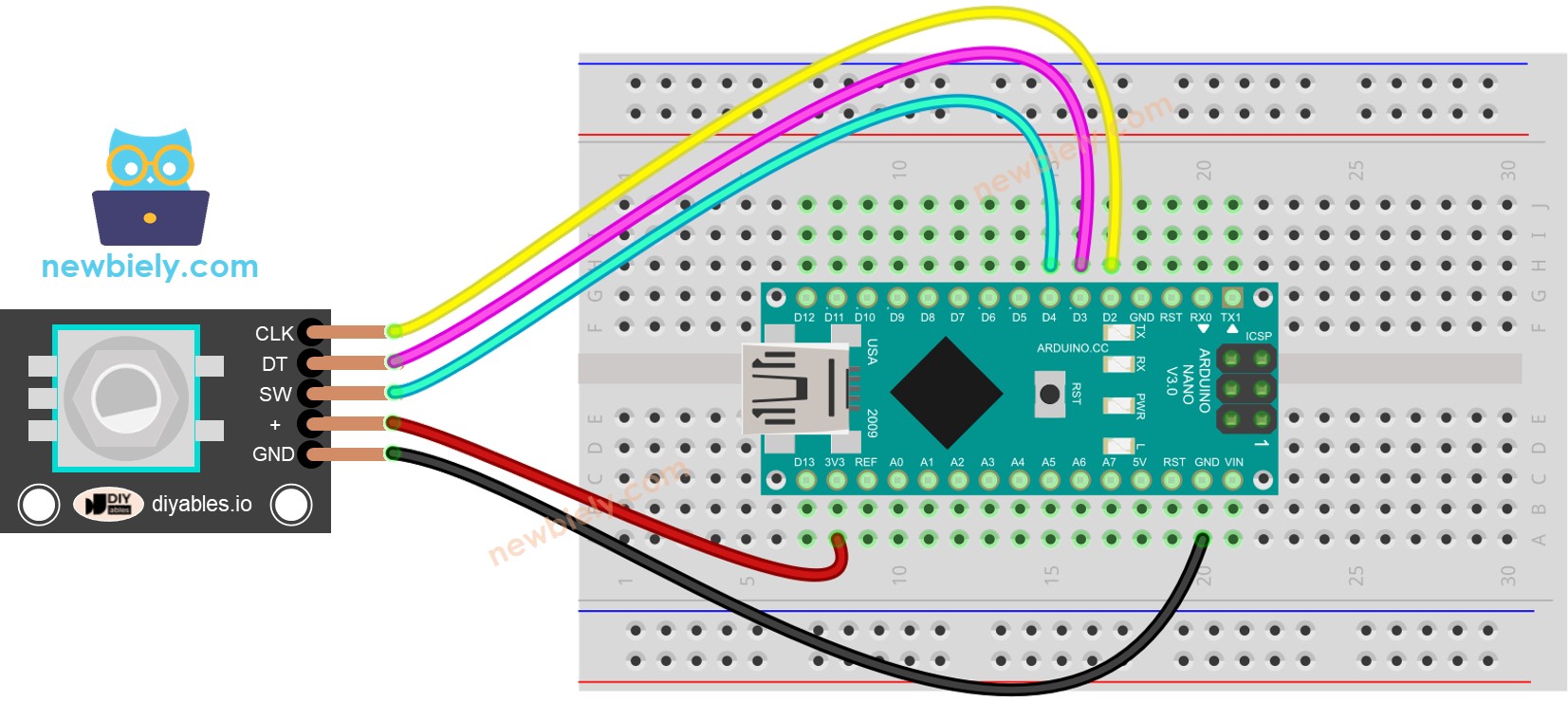
이 이미지는 Fritzing을 사용하여 만들어졌습니다. 이미지를 확대하려면 클릭하세요.
Arduino Nano와 기타 부품에 전원을 공급하는 가장 효과적인 방법은 다음 링크를 참조하세요: 아두이노 나노 전원 공급 방법.
아두이노 나노 코드 - 로터리 엔코더
아래의 아두이노 나노 코드는 다음을 수행합니다:
- 엔코더의 회전 방향과 회전량을 감지합니다.
- 시계 방향으로 한 단계(클릭) 돌린 것을 감지하면 카운터를 1 증가시킵니다.
- 반시계 방향으로 한 단계(클릭) 돌린 것을 감지하면 카운터를 1 감소시킵니다.
- 버튼이 눌렸는지 감지합니다.
버튼 디바운싱 코드를 간단하게 하기 위해 ezButton 라이브러리가 사용됩니다.
사용 방법
- Arduino IDE에 ezButton 라이브러리를 설치하세요. 방법 보기
- 위의 코드를 복사하여 Arduino IDE로 열기
- 코드를 Arduino Nano에 업로드하기 위해 Arduino IDE에서 Upload 버튼을 클릭하세요
- 손잡이를 시계 방향으로 돌린 다음, 반시계 방향으로 돌리세요
- 손잡이를 누르세요
- 시리얼 모니터에서 결과를 확인하세요.
코드 설명
코드의 줄별 주석을 확인하세요.
아두이노 나노 코드 - 인터럽트를 사용한 로터리 인코더
이전 예제 코드에서는 폴링 방식을 사용하여 지속적으로 핀의 상태를 확인합니다. 이 방식은 두 가지 단점이 있습니다:
- 아두이노 나노 자원 낭비
- 다른 코드가 실행하는 데 시간이 오래 걸리면 일부 카운터가 누락될 수 있습니다.
이를 처리하는 한 가지 방법은 인터럽트를 사용하는 것입니다. 인터럽트는 특정 이벤트를 지속적으로 확인할 필요를 없애줍니다. 이를 통해 아두이노 나노가 다른 작업을 수행하면서도 이벤트를 놓치지 않고 처리할 수 있습니다.
다음은 인터럽트를 사용하여 로터리 인코더를 읽는 방법의 예입니다.
이제 볼륨을 돌리면, 이전 코드에서 보았던 것처럼 시리얼 모니터에 정보가 나타나는 것을 알 수 있습니다.
※ 주의:
인터럽트를 사용하려면 인코더의 CLK 핀을 인터럽트를 처리할 수 있는 아두이노 나노 핀에 연결해야 합니다. 하지만 모든 아두이노 나노 핀이 이를 수행할 수 있는 것은 아닙니다. 예를 들어, 아두이노 나노에서는 오직 2번과 3번 핀만 인터럽트와 함께 작동할 수 있습니다.
다른 웹사이트의 튜토리얼에서 하나의 인코더에 대해 두 개의 인터럽트를 사용하는 경우를 볼 수 있지만, 이것은 불필요하고 낭비입니다. 단 하나의 인터럽트만으로 충분합니다.
인터럽트에서 사용되는 전역 변수에는 volatile 키워드를 사용하는 것이 중요합니다. 이를 무시하면 예상치 못한 문제가 발생할 수 있습니다.
인터럽트 내의 코드를 가능한 한 단순하게 유지하세요. 인터럽트 내에서 Serial.print() 또는 Serial.println()을 사용하는 것은 피하세요.
아두이노 나노 로터리 엔코더 응용 프로그램
로터리 엔코더를 사용하여 다음과 같은 응용 프로그램을 할 수 있지만 이에 국한되지는 않습니다:
- Arduino Nano - 로터리 엔코더가 서보 모터의 위치를 제어합니다.
- Arduino Nano - 로터리 엔코더가 LED의 밝기를 제어합니다.
- Arduino Nano - 로터리 엔코더가 스테퍼 모터의 속도를 제어합니다.
동영상
비디오 제작은 시간이 많이 걸리는 작업입니다. 비디오 튜토리얼이 학습에 도움이 되었다면, YouTube 채널 을 구독하여 알려 주시기 바랍니다. 비디오에 대한 높은 수요가 있다면, 비디오를 만들기 위해 노력하겠습니다.



