아두이노 우노 Q 피드백이 있는 액추에이터
이 가이드에서는 Arduino UNO Q와 Motor Shield Rev3에서 포텐셔미터를 사용하여 위치 피드백이 있는 선형 액추에이터를 제어하는 방법을 배웁니다. 다음을 배우게 됩니다:
- 액추에이터의 피드백 포텐셔미터를 보정하는 방법
- 현재 액추에이터 위치를 밀리미터 단위로 계산하는 방법
- 액추에이터를 특정 목표 위치로 자동으로 구동하는 방법
- Linux Bridge를 통해 액추에이터 위치를 모니터링하고 제어하는 방법
- Telegram을 통해 액추에이터 위치를 원격으로 제어하는 방법
피드백이 없는 기본 확장/축소 제어는 아두이노 우노 Q - 액추에이터를 참조하세요.
필요한 하드웨어
| 1 | × | Arduino UNO Q | 아마존 | |
| 1 | × | USB Cable for Arduino Uno Q | 아마존 | |
| 1 | × | 12V 피드백 기능이 있는 선형 액추에이터 | 아마존 | |
| 1 | × | Motor Shield for Arduino | 쿠팡 | 아마존 | |
| 1 | × | 12V 전원 어댑터 | 아마존 | |
| 1 | × | DC 커넥터 전원 연결 잭 플러그 소켓 | 쿠팡 | 아마존 | |
| 1 | × | 점퍼케이블 | 쿠팡 | 아마존 | |
| 1 | × | (추천) 아두이노 우노용 스크루 터미널 블록 쉴드 | 쿠팡 | 아마존 | |
| 1 | × | (추천) Sensors/Servo Expansion Shield for Arduino Uno | 쿠팡 | 아마존 | |
| 1 | × | (추천) 아두이노 우노용 브레드보드 쉴드 | 쿠팡 | 아마존 | |
| 1 | × | (추천) 아두이노 우노용 케이스 | 쿠팡 | 아마존 | |
| 1 | × | (추천) 아두이노 우노용 프로토타이핑 베이스 플레이트 & 브레드보드 키트 | 아마존 |
피드백이 있는 선형 액추에이터에 대해
피드백이 있는 선형 액추에이터에는 로드가 확장되고 축소됨에 따라 저항이 변하는 통합 포텐셔미터가 있습니다. 이 포텐셔미터를 읽으면 로드의 현재 위치를 계산하고 정확한 목표 위치로 구동할 수 있습니다.
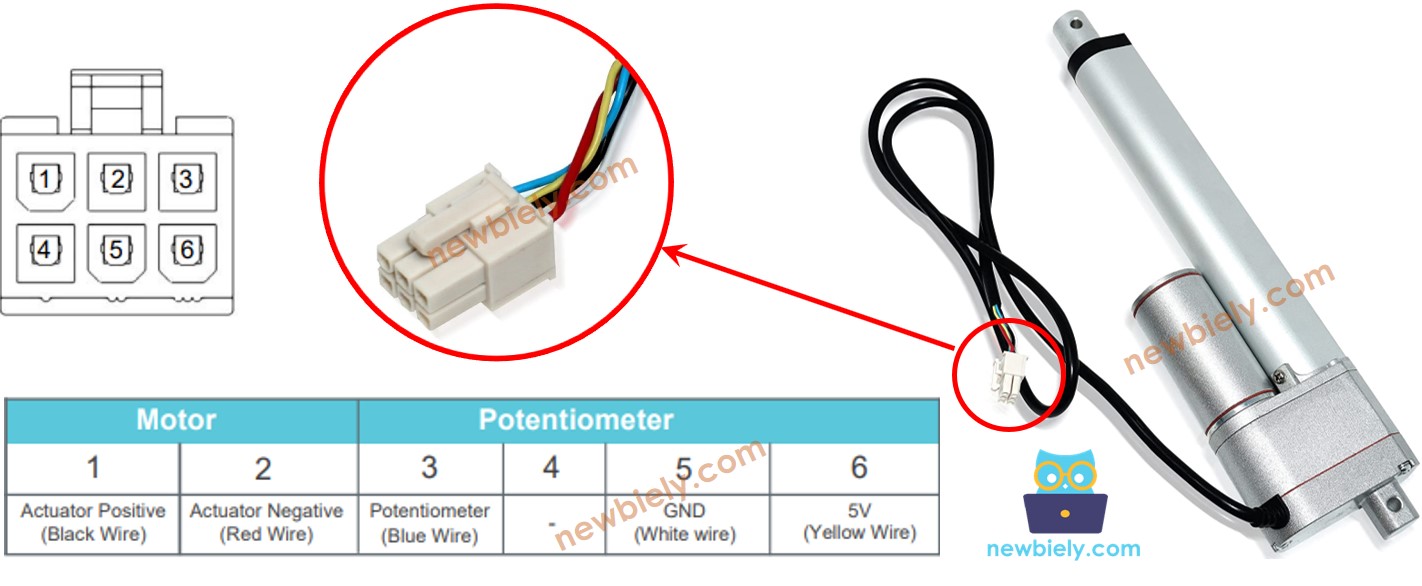
피드백이 있는 선형 액추에이터 핀아웃
피드백이 있는 선형 액추에이터는 5개의 와이어(일부 모델에서는 4개)가 있습니다:
- 모터 와이어(2개): Motor Shield Rev3 채널 A를 통한 전원 및 극성 제어
- 포텐셔미터 와이어(3개): VCC, GND 및 신호(와이퍼)
※ 주의:
Motor Shield Rev3 채널 A는 현재 감지에 A0을 사용합니다. 충돌을 피하려면 액추에이터의 피드백 포텐셔미터 신호 와이어를 A2에 연결하세요.
작동 방식
- Motor Shield Rev3를 통해 모터에 전원을 공급합니다(motor.run(MOTOR_FORWARD, 255)로 확장, motor.run(MOTOR_BACKWARD, 255)로 축소, motor.brake()로 정지).
- analogRead(A2)로 포텐셔미터 신호를 읽습니다 — Arduino UNO Q에서 12비트 값(0–4095)을 반환합니다.
- map()을 사용하여 원시 ADC 값을 밀리미터로 변환합니다.
- 현재 위치와 목표를 비교합니다. 필요에 따라 계속 이동하거나 정지합니다.
※ 주의:
위치를 제어하기 전에 액추에이터를 보정해야 합니다: 전체 한계까지 확장하고 POTENTIOMETER_MAX를 읽습니다. 전체 한계까지 축소하고 POTENTIOMETER_MIN을 읽습니다. 이 값들은 코드의 자리 표시자를 대체합니다.
Motor Shield Rev3(핀아웃, 작동 방식 및 프로그래밍 방법)에 익숙하지 않으면 아두이노 우노 Q - DC 모터 실드 튜토리얼을 먼저 참조하세요.
배선도
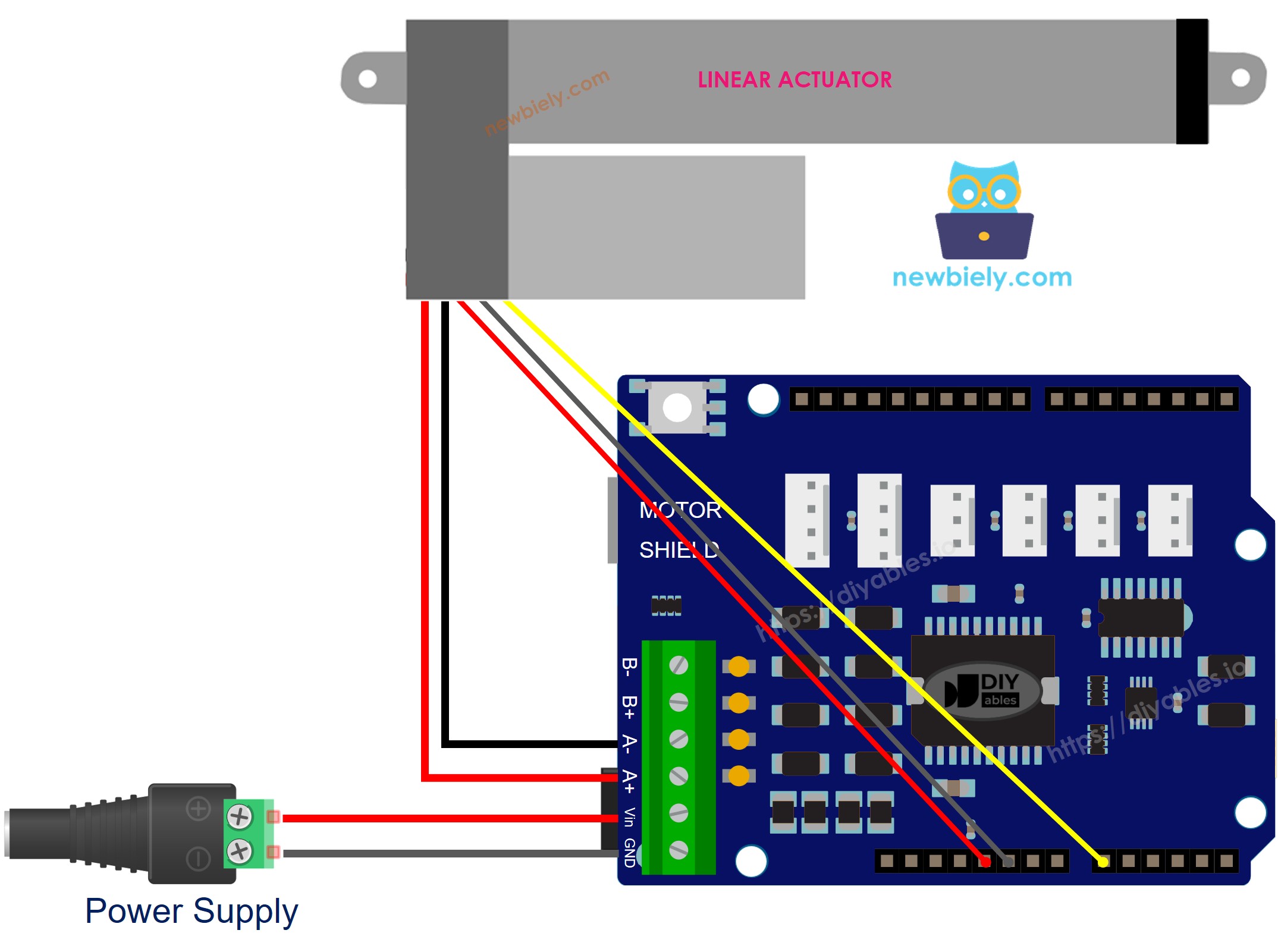
이 이미지는 Fritzing을 사용하여 만들어졌습니다. 이미지를 확대하려면 클릭하세요.
MCU 코드
Arduino UNO Q에는 두 개의 프로세서가 있습니다: STM32 MCU(실시간 하드웨어 제어 처리)와 Qualcomm MPU(Debian Linux 실행). 이 섹션에서는 STM32 MCU만 프로그래밍합니다. 나중 섹션에서는 두 프로세서가 함께 작동하는 방식을 보여줍니다.
이 튜토리얼은 세 단계로 나뉩니다:
1단계 – 보정
액추에이터가 완전히 확장되고 완전히 축소될 때의 원시 ADC 값을 찾으려면 이 코드를 실행하세요. 값을 메모하세요 — 2단계와 3단계에서 사용합니다.
빠른 단계
- 실드 스택: Motor Shield Rev3를 Arduino UNO Q 헤더에 단단히 누르세요. 액추에이터 모터 와이어를 채널 A 나선 단자에 연결합니다. 12V 전원 공급 장치를 실드의 전원 나선 단자에 연결합니다. 포텐셔미터 신호 와이어를 A2에, 포텐셔미터 VCC를 3.3V에, 포텐셔미터 GND를 GND에 연결합니다.
- 연결: USB-C 케이블로 Arduino UNO Q를 컴퓨터에 연결합니다.
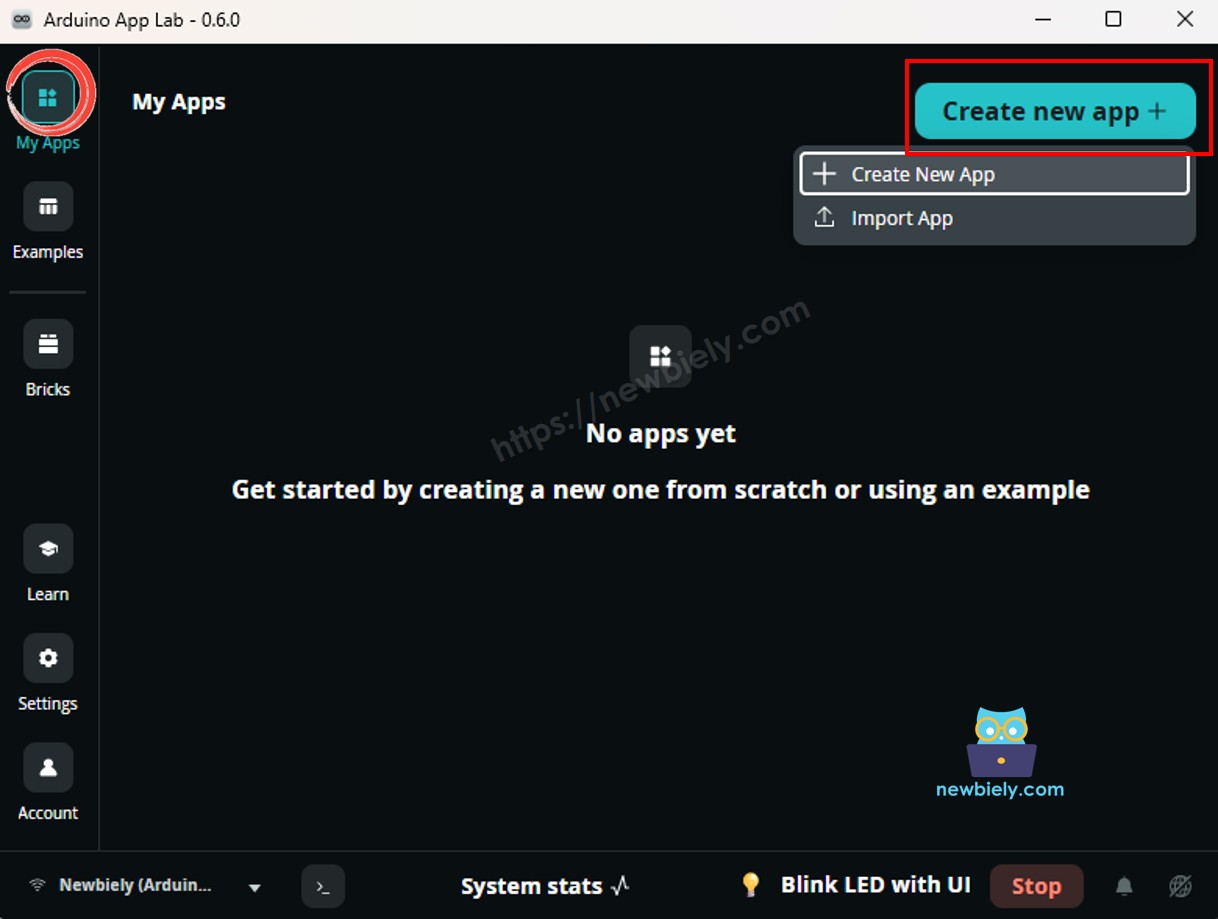
- Arduino App Lab 열기: Arduino App Lab을 시작하고 Arduino UNO Q를 감지할 때까지 기다립니다.
- 새 앱 만들기: Create New App 버튼을 클릭합니다.
- 앱에 이름을 지정합니다(예: DIYables_ActuatorFeedback).
- Create를 클릭하여 확인합니다.
- sketch/sketch.ino 파일을 찾고 위의 보정 코드를 붙여넣습니다.
- Install the library: Click the Add sketch library button (the open book icon with a + sign) in the left sidebar.
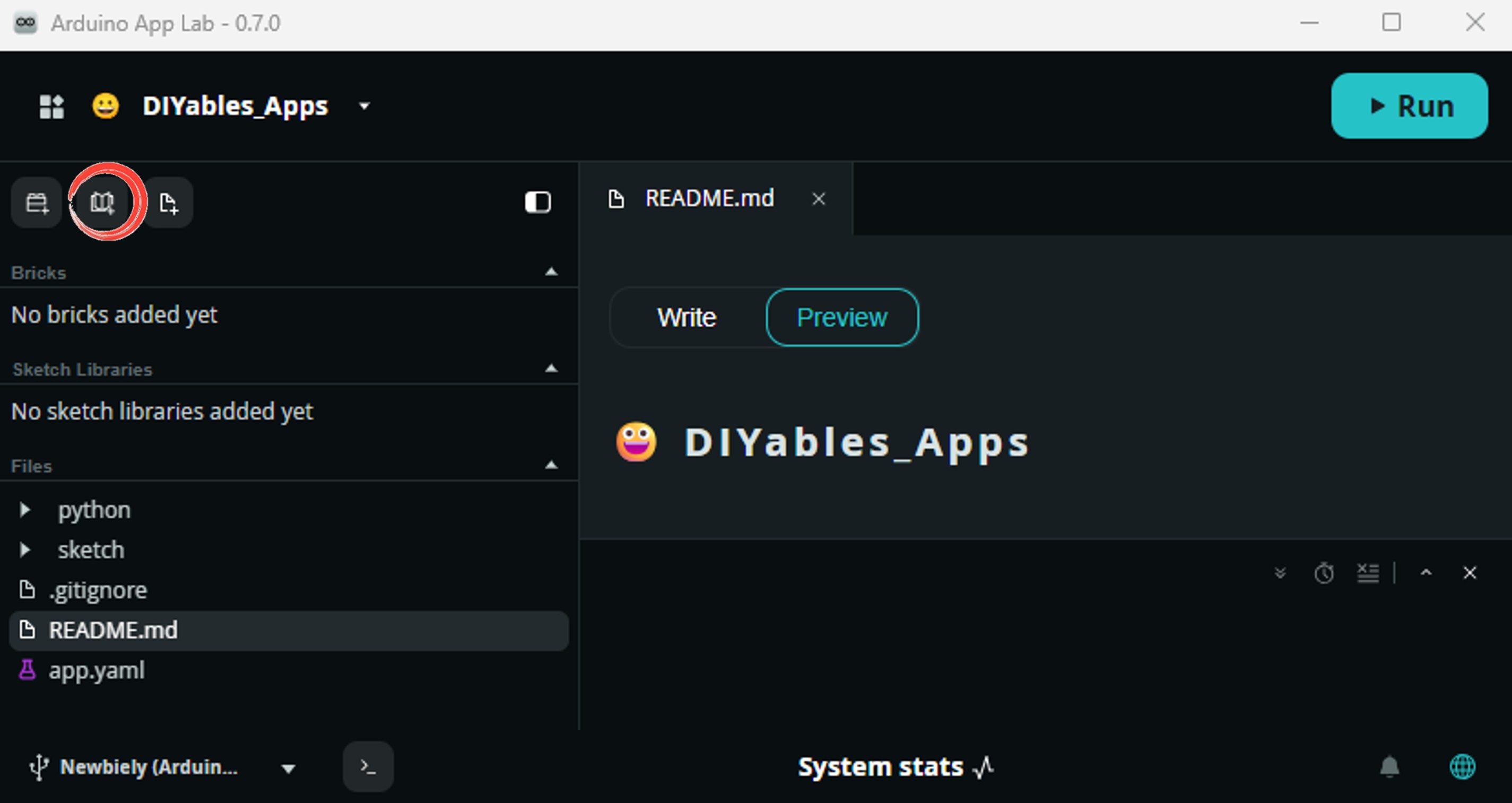
- Search for DIYables_DC_Motor created by DIYables.io and click the Install button.
- 업로드: Run을 클릭하여 업로드합니다.
- 값 메모: 40초 후(20초 확장 + 20초 축소), POTENTIOMETER_MAX 및 POTENTIOMETER_MIN 값을 메모합니다.
2단계 – 위치 계산
보정된 값을 사용하여 현재 위치를 밀리미터 단위로 계산합니다:
- STROKE_LENGTH를 액추에이터의 스트로크 길이(mm)로 바꿉니다.
- POTENTIOMETER_MAX 및 POTENTIOMETER_MIN을 1단계에서 메모한 값으로 바꿉니다.
빠른 단계
- 코드 맨 위의 자리 표시자를 실제 값으로 업데이트합니다.
- 업로드 및 관찰: 액추에이터가 확장되는 동안 계산된 위치를 확인합니다.
3단계 – 위치 제어
보정된 값으로 액추에이터를 특정 목표 위치로 구동합니다:
- targetPosition_mm을 원하는 위치로 설정합니다(0 = 완전히 축소, STROKE_LENGTH = 완전히 확장).
빠른 단계
- 자리 표시자를 업데이트합니다(STROKE_LENGTH, POTENTIOMETER_MAX, POTENTIOMETER_MIN) 및 targetPosition_mm을 설정합니다.
- 업로드 및 테스트: 액추에이터가 목표로 이동하여 위치를 유지합니다.
Linux + MCU Bridge 프로그래밍
Arduino UNO Q에는 함께 작동하는 두 개의 프로세서가 있습니다: MPU(Qualcomm, Debian Linux 실행)와 MCU(STM32, Zephyr OS와 Arduino 스케치 실행). Arduino_RouterBridge 라이브러리를 통해 RPC를 사용하여 통신합니다.
- Motor Shield Rev3 및 액추에이터는 MCU(STM32)에 의해 제어됩니다 — DIYables_DC_Motor 라이브러리가 채널 A를 구동합니다. 포텐셔미터 피드백은 A2에 있습니다.
- MPU는 액추에이터를 직접 제어할 수 없습니다 — Bridge.call("read_position")을 호출하여 위치를 읽고 액추에이터를 구동하는 MCU 함수를 호출합니다.
- MPU는 Wi-Fi를 가지고 있습니다 — 따라서 Telegram 명령을 수락하여 목표 위치를 원격으로 모니터링하거나 변경할 수 있습니다.
- 통신: Linux 측의 Bridge.call()은 MCU 측의 Bridge.provide_safe()를 호출합니다(motor.run() 및 motor.brake()는 하드웨어 API를 사용하므로).
- ⚠️ 예약됨: /dev/ttyHS1(Linux) 및 Serial1(MCU)은 Arduino Router에서 사용됩니다 — 절대로 직접 열지 마세요.
MCU 스케치 — Bridge를 사용한 위치 피드백:
Python 스크립트(Arduino App Lab) — 위치를 계속 읽고 제어:
- 참고: MCU 스케치에서 Bridge.begin()이 호출되었는지 확인하고 Python 스크립트를 실행하기 전에 스케치가 업로드되었는지 확인하세요.
- ⚠️ 경고: /dev/ttyHS1(Linux에서) 또는 Serial1(MCU에서)을 직접 열지 마세요 — 이들은 Arduino Router에서 예약되었습니다.
빠른 단계
- Bridge MCU 스케치의 자리 표시자를 업데이트합니다(STROKE_LENGTH, POTENTIOMETER_MAX, POTENTIOMETER_MIN) 및 targetPosition_mm을 설정합니다.
- Bridge MCU 스케치의 자리 표시자를 업데이트합니다(STROKE_LENGTH, POTENTIOMETER_MAX, POTENTIOMETER_MIN) 및 targetPosition_mm을 설정합니다.
- MCU 스케치 업로드: Arduino App Lab을 열고 Bridge MCU 스케치를 sketch/sketch.ino에 붙여넣고 DIYables_DC_Motor 및 Arduino_RouterBridge 라이브러리를 모두 설치한 후 Run을 클릭합니다.
- Python 스크립트 추가: 위의 Python 코드를 Python 탭에 붙여넣습니다.
- 앱 실행: Python은 200ms마다 read_position을 호출합니다. MCU는 목표로 이동하고 위치를 보고합니다.
- 콘솔 확인: 콘솔 → MCU Monitor 하위 탭을 엽니다.
App Lab 콘솔 출력
Telegram 통합
Telegram의 /position 명령으로 액추에이터 위치를 모니터링하고 보고합니다.
아직 Telegram 봇이 없으면 계속하기 전에 아두이노 우노 Q - 텔레그램 봇을 참조하여 봇 토큰을 얻으세요.
MCU 스케치: 이전 Bridge 섹션의 동일한 MCU 스케치를 유지하세요 — 변경이 필요 없습니다. STM32에서 이미 업로드되고 실행 중인지 확인하세요.
Python 스크립트(Arduino App Lab) — 액추에이터 위치를 위한 Telegram 봇:
- 참고: YOUR_BOT_TOKEN을 @BotFather에서 얻은 토큰으로 바꾸세요.
- /position을 전송하여 MCU에서 위치 읽기를 트리거합니다.
빠른 단계
- MCU 스케치 업로드: Bridge MCU 스케치를 사용합니다(아직 수행하지 않았으면 먼저 업로드하세요).
- Telegram 스크립트 붙여넣기: 위의 Python 코드를 앱의 Python 탭에 복사합니다.
- 토큰 설정: YOUR_BOT_TOKEN을 실제 봇 토큰으로 바꾸세요.
- 앱 실행하고 Telegram을 통해 /position을 전송합니다.
App Lab 콘솔 출력

ArduinoBot
OpenClaw 통합
이 튜토리얼을 OpenClaw에 적용하려면 아두이노 우노 Q - OpenClaw 튜토리얼의 지침을 참조하세요.
응용 프로그램/프로젝트 아이디어
- 정밀 게이트: 일정을 기반으로 정확한 위치(예: 50% 이동)로 게이트를 엽니다
- 조정 가능한 태양광 패널: 액추에이터 위치 피드백을 사용하여 계산된 각도로 패널을 기울입니다
- 높이 조정 지그: 제조 설정에서 보정된 높이로 워크피스를 이동합니다
- 자동 밸브: 흐름 요구 사항을 기반으로 특정 열린 백분율에서 밸브를 배치합니다
- 재활 장치: 위치 추적으로 목표 각도로 운동 액추에이터를 구동합니다
자신에게 도전하세요
- 쉬움: targetPosition_mm을 25mm로 변경하고 정확도를 확인합니다
- 중간: /set50 Telegram 명령을 추가하여 액추에이터를 50mm로 이동합니다
- 고급: 동적 목표로 /goto <mm> 명령을 수락하고 이동하기 전에 범위를 확인합니다



