아두이노 우노 Q 모션 센서가 릴레이 제어
이 가이드에서는 HC-SR501 모션 센서를 사용하여 모션이 감지되면 자동으로 릴레이를 활성화하고 모션이 멈추면 비활성화하는 방법을 Arduino UNO Q로 알아봅니다.
필요한 하드웨어
| 1 | × | Arduino UNO Q | 아마존 | |
| 1 | × | USB Cable for Arduino Uno Q | 아마존 | |
| 1 | × | HC-SR501 모션 센서 | 쿠팡 | 아마존 | |
| 1 | × | 릴레이 | 아마존 | |
| 1 | × | 점퍼케이블 | 쿠팡 | 아마존 | |
| 1 | × | (추천) 아두이노 우노용 스크루 터미널 블록 쉴드 | 쿠팡 | 아마존 | |
| 1 | × | (추천) Sensors/Servo Expansion Shield for Arduino Uno | 쿠팡 | 아마존 | |
| 1 | × | (추천) 아두이노 우노용 브레드보드 쉴드 | 쿠팡 | 아마존 | |
| 1 | × | (추천) 아두이노 우노용 케이스 | 쿠팡 | 아마존 | |
| 1 | × | (추천) 아두이노 우노용 프로토타이핑 베이스 플레이트 & 브레드보드 키트 | 아마존 |
배선도
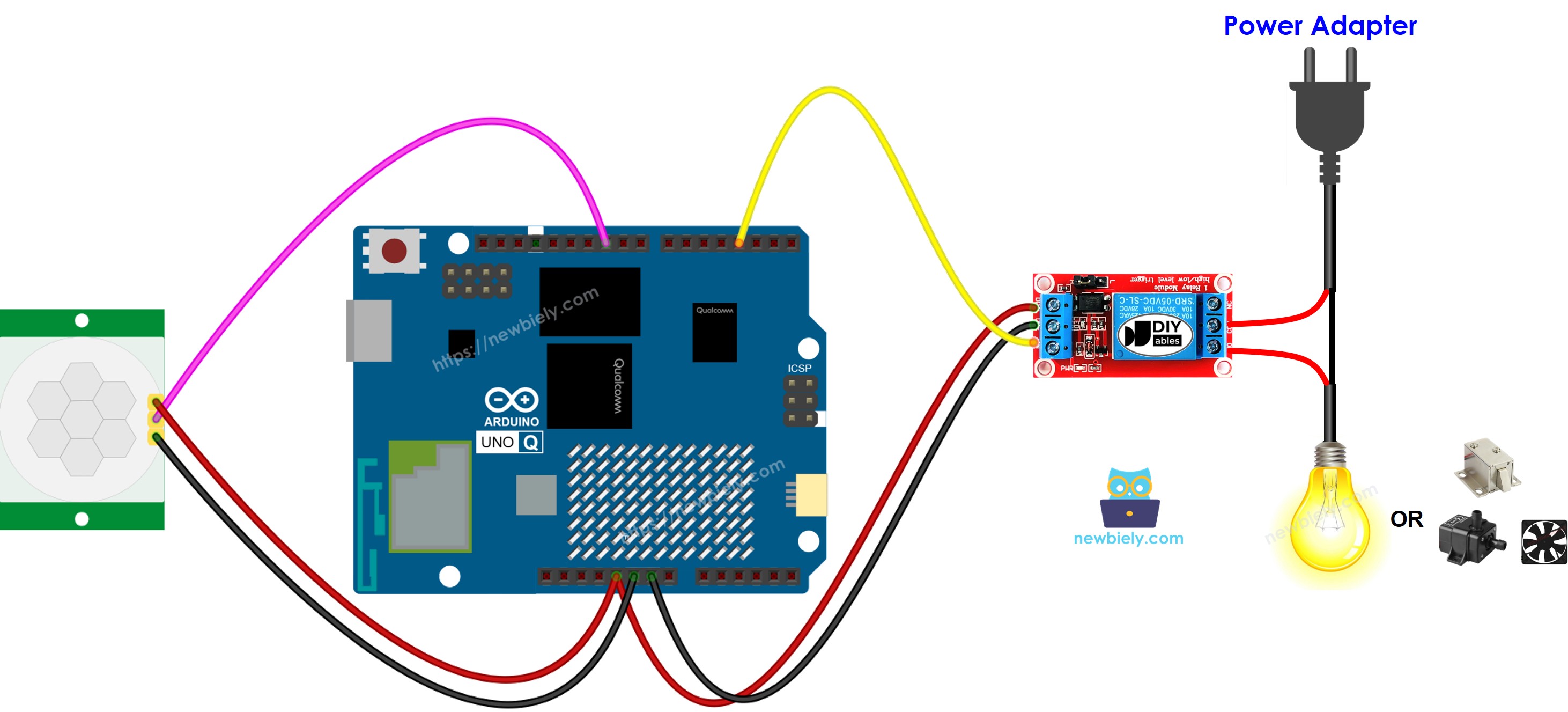
이 이미지는 Fritzing을 사용하여 만들어졌습니다. 이미지를 확대하려면 클릭하세요.
MCU 코드
Arduino UNO Q에는 두 개의 프로세서가 있습니다: STM32 MCU(실시간 하드웨어 제어 처리)와 Qualcomm MPU(Debian Linux 실행). 이 섹션에서는 STM32 MCU만 프로그래밍됩니다 — Linux 쪽은 유휴 상태입니다. 이후 섹션에서는 두 프로세서가 함께 작동하는 방법을 보여줄 것입니다.
빠른 단계
- 처음 Arduino UNO Q를 사용하시나요? 계속하기 전에 아두이노 우노 Q 시작하기 튜토리얼을 따라 개발 환경을 준비하세요.
- 구성 요소 배선: 센서 OUTPUT → 핀 7, 릴레이 IN → 핀 9에 연결합니다.
- 연결: USB-C 케이블로 Arduino UNO Q를 컴퓨터에 연결합니다.
- Arduino App Lab 열기: Arduino App Lab을 시작하고 Arduino UNO Q를 감지할 때까지 기다립니다.
- 새 앱 만들기: 새 앱 만들기 버튼을 클릭합니다.
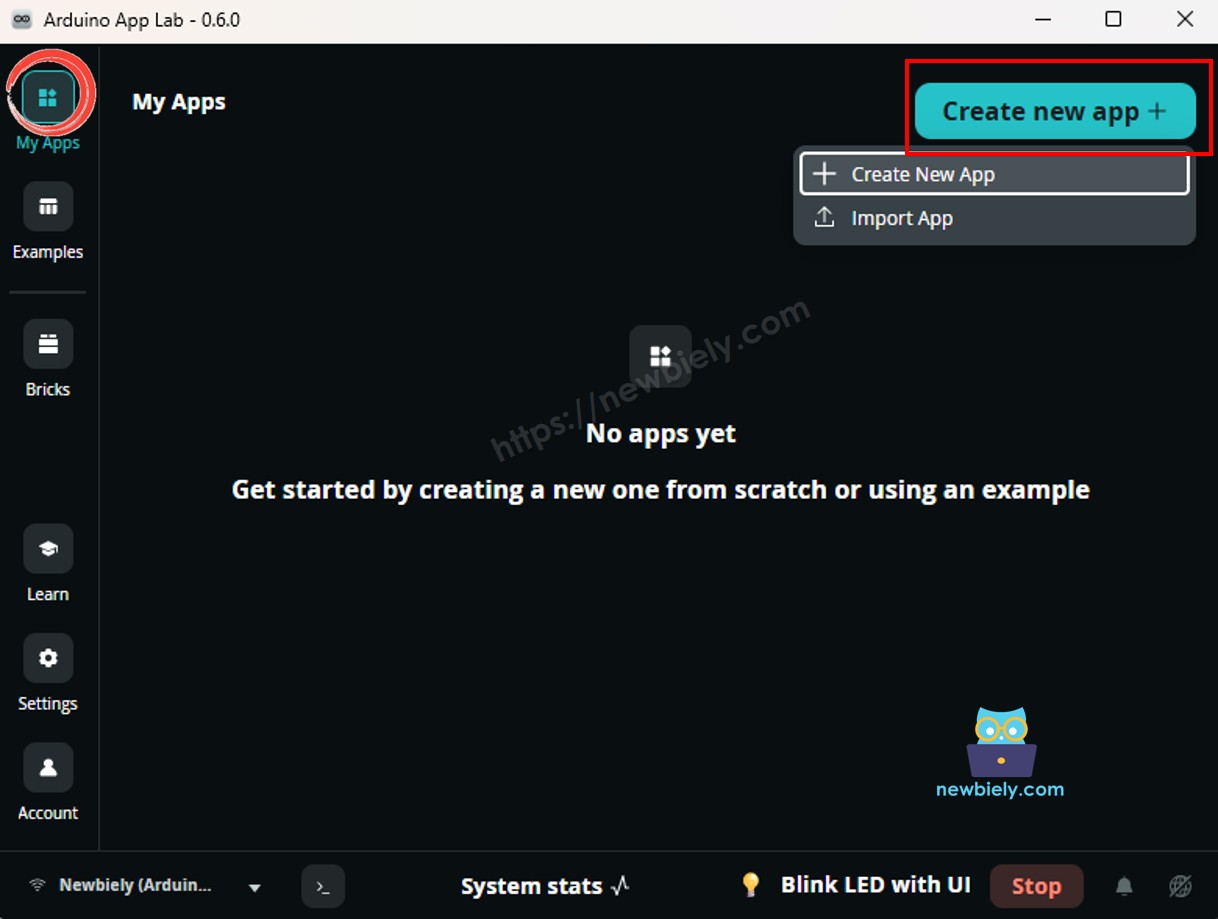
- 앱에 이름을 지정합니다. 예: DIYables_MotionRelay
- 만들기를 클릭하여 확인합니다.
- 새 앱 내에서 생성된 폴더 및 파일 집합을 볼 수 있습니다.
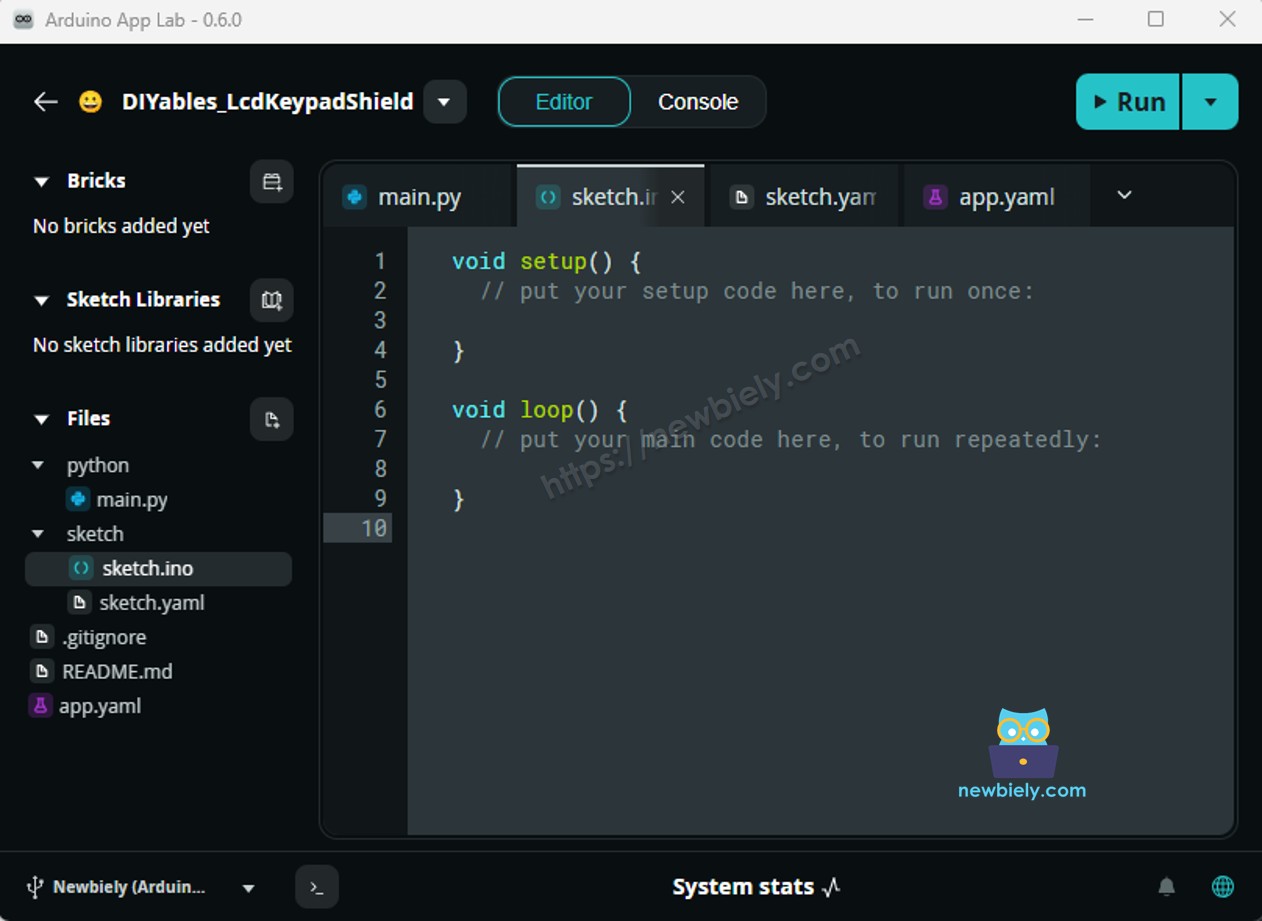
- sketch/sketch.ino 파일을 찾습니다 — 여기에 MCU 스케치를 붙여넣을 것입니다.
- Install the library: Click the Add sketch library button (the open book icon with a + sign) in the left sidebar.
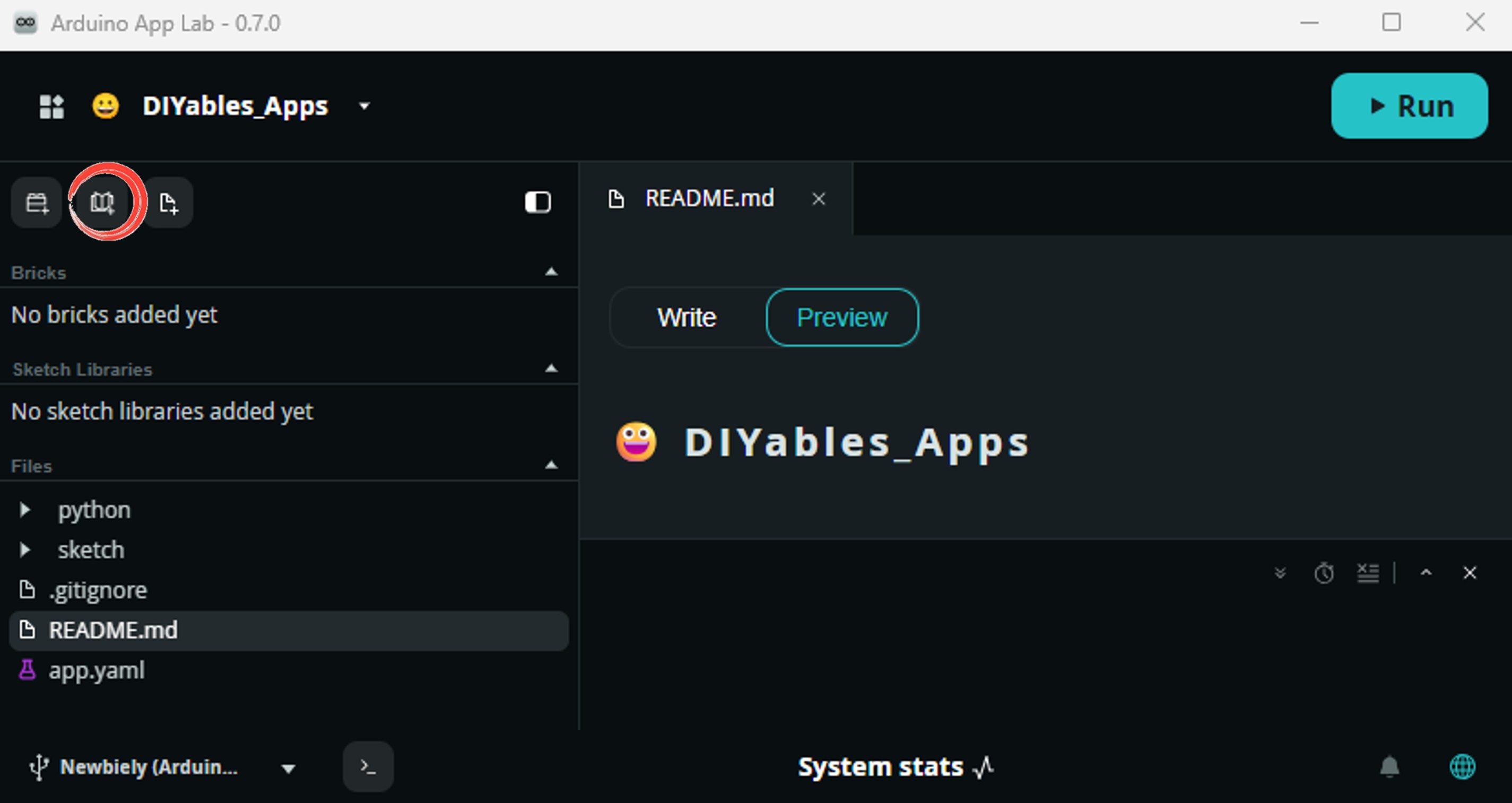
- Search for Arduino_RouterBridge created by Arduino and click the Install button.
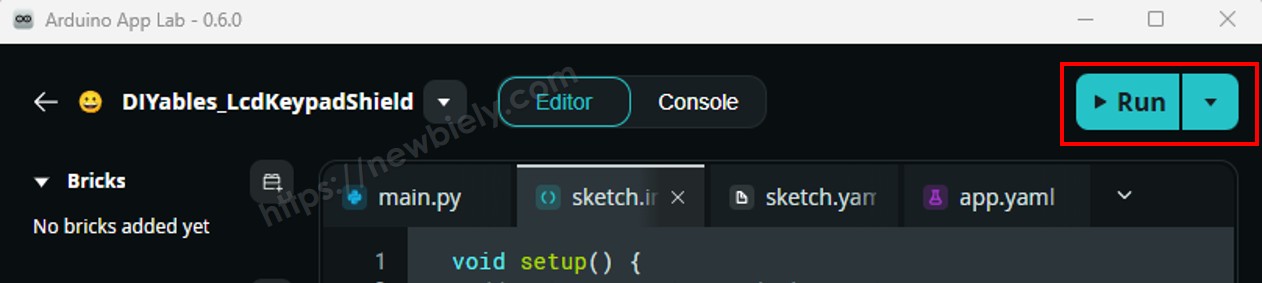
- 업로드: Arduino App Lab의 실행 버튼을 클릭하여 STM32에 컴파일 및 업로드합니다.
- 테스트: 센서 앞을 지나가세요 — 모션이 감지되면 릴레이가 활성화되고 모션이 멈추면 비활성화됩니다.
Linux + MCU Bridge 프로그래밍
Arduino UNO Q에는 함께 작동하는 두 개의 프로세서가 있습니다: MPU(Qualcomm, Debian Linux 실행)와 MCU(STM32, Zephyr OS와 Arduino 스케치 실행). 이들은 Arduino_RouterBridge 라이브러리를 통해 RPC를 사용하여 통신합니다 — 원본 시리얼 포트를 통하지 않습니다.
- 모션 센서와 릴레이는 모두 MCU(STM32)에 연결됩니다 — 센서는 핀 7, 릴레이는 핀 9입니다.
- MPU는 직접 제어할 수 없습니다 — MCU에서 Bridge.call("check_motion")을 호출하여 센서를 읽고 릴레이를 업데이트합니다.
- MPU에는 Wi-Fi가 있습니다 — MPU가 Wi-Fi를 갖춘 전체 Debian Linux를 실행하므로 릴레이 상태를 Telegram으로 전달할 수 있습니다.
- 통신: Linux 쪽의 Bridge.call()은 MCU 쪽의 Bridge.provide_safe()를 호출합니다(digitalWrite()을 사용하여 릴레이를 제어하므로).
- ⚠️ 예약됨: /dev/ttyHS1(Linux) 및 Serial1(MCU)은 Arduino Router에서 사용됩니다 — 절대 직접 열지 마세요.
즉: MPU가 센서를 폴링합니다 → MCU가 핀을 읽고 릴레이를 업데이트하며 Monitor에 보고합니다.
MCU 스케치 — 모션 센서가 Bridge로 릴레이를 제어합니다:
Python 스크립트(Arduino App Lab) — 0.5초마다 모션 상태를 폴링합니다:
- 참고: MCU 스케치에서 Bridge.begin()이 호출되었는지 확인하고 Linux 쪽에서 Python 스크립트를 실행하기 전에 스케치가 업로드되었는지 확인하세요.
- ⚠️ 경고: Linux에서 /dev/ttyHS1을 직접 열거나 MCU에서 Serial1을 사용하지 마세요 — 이들은 Arduino Router에서 예약되었으며 액세스하면 Bridge가 손상됩니다.
빠른 단계
- MCU 스케치 업로드: Arduino App Lab을 열고 새 앱을 만들고 Bridge MCU 스케치를 sketch/sketch.ino에 붙여넣고 Arduino_RouterBridge 라이브러리를 설치한 후 실행을 클릭합니다.
- Python 스크립트 추가: 위의 Python 코드를 동일한 앱의 Python 탭에 붙여넣습니다.
- 앱 실행: 실행을 클릭합니다 — Python이 0.5초마다 모션을 폴링합니다. MCU가 릴레이와 Monitor를 업데이트합니다.
- 콘솔 확인: 콘솔 탭 열기 → MCU Monitor 서브탭을 열고 센서 앞을 지나갑니다.
App Lab 콘솔 출력
Telegram 통합
Telegram을 통해 원격으로 모션 활성화 릴레이 상태를 모니터링합니다.
Telegram 봇이 아직 없다면 계속하기 전에 아두이노 우노 Q - 텔레그램 봇을 참고하여 봇 토큰을 얻으세요.
MCU 스케치: 이전 Bridge 섹션의 동일한 MCU 스케치를 유지합니다 — 변경이 필요하지 않습니다. 계속하기 전에 STM32에 이미 업로드되고 실행 중인지 확인하세요.
Python 스크립트(Arduino App Lab) — 모션 활성화 릴레이용 Telegram 봇:
- 참고: YOUR_BOT_TOKEN을 Telegram의 @BotFather에서 받은 토큰으로 바꾸세요.
- /status를 보내 모션 센서를 수동으로 확인하고 릴레이를 업데이트합니다.
빠른 단계
- MCU 스케치 업로드: 이전 섹션의 Bridge MCU 스케치를 사용합니다(아직 업로드되지 않았으면 먼저 업로드하세요).
- Telegram 스크립트 붙여넣기: 위의 Python 코드를 Arduino App Lab의 앱 Python 탭에 복사합니다.
- 토큰 설정: 스크립트의 YOUR_BOT_TOKEN을 실제 봇 토큰으로 바꿉니다.
- 앱 실행: 실행을 클릭합니다 — 봇이 Telegram 메시지를 수신 대기합니다.
- 테스트: /status를 보냅니다 — 봇이 모션 상태와 릴레이 상태로 응답합니다.
App Lab 콘솔 출력

ArduinoBot
OpenClaw 통합
이 튜토리얼에 OpenClaw를 적용할 수 있습니다. 아두이노 우노 Q - OpenClaw 튜토리얼의 지시사항을 참고하세요.
애플리케이션/프로젝트 아이디어
- 자동 가전 제어: 사람이 방에 들어오면 선풍기, 히터 또는 조명을 켭니다.
- 보안 시스템: 밤에 모션이 감지되면 사이렌 릴레이를 활성화합니다.
- 스마트 도어 잠금 해제: 사람이 접근하면 전자기적 잠금 릴레이를 트리거합니다.
- 에너지 관리: 확장 기간 동안 모션이 감지되지 않으면 자동으로 장비의 전원을 끕니다.
도전해 보세요
- 쉬움: 릴레이가 켜질 때 울리는 부저를 추가합니다.
- 중간: 모션이 멈춘 후 30초 동안 릴레이를 켠 상태로 유지한 후 끕니다.
- 고급: 릴레이가 활성화될 때마다 자동으로 Telegram 알림을 보냅니다.



