ESP8266을 통해 블루투스로 서보 모터 제어
이 튜토리얼은 블루투스(HC-05 모듈) 또는 BLE(HM-10 모듈)을 사용하여 서보 모터를 관리하도록 ESP8266을 프로그래밍하는 방법을 안내합니다. 두 모듈에 대한 지침이 모두 제공됩니다.
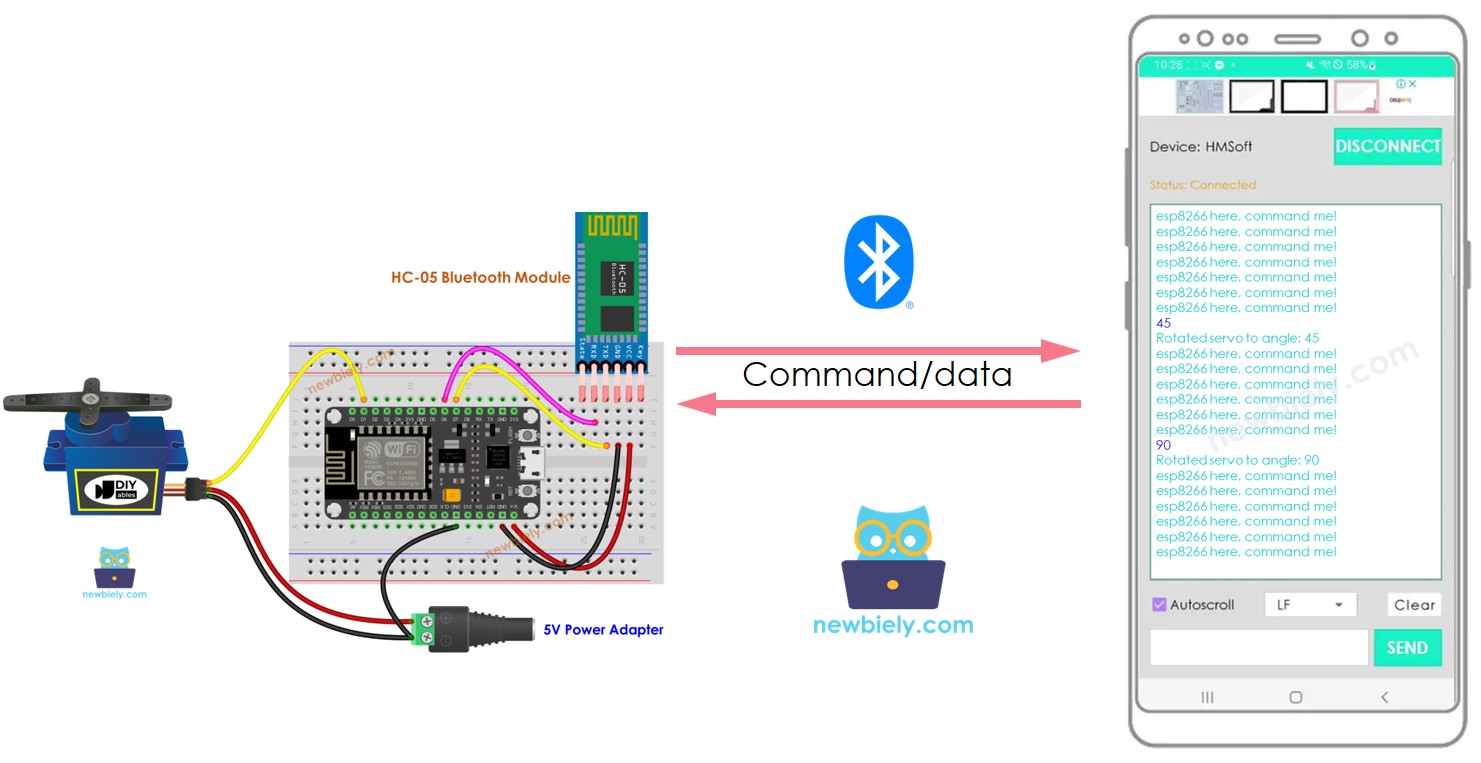
우리는 Bluetooth Serial Monitor App을 사용하여 스마트폰에서 각도 값을 ESP8266으로 전송할 것입니다. ESP8266은 그 다음 받은 값을 기준으로 서보 모터를 조정할 것입니다.
준비물
| 1 | × | Micro USB Cable | 아마존 | |
| 1 | × | ESP8266 NodeMCU | 쿠팡 | 아마존 | |
| 1 | × | USB 케이블 타입-A to 타입-C (USB-A PC용) | 쿠팡 | 아마존 | |
| 1 | × | USB 케이블 타입-C to 타입-C (USB-C PC용) | 아마존 | |
| 1 | × | HC-05 블루투스 모듈 | 아마존 | |
| 1 | × | (또는) HM-10 BLE Module | 아마존 | |
| 1 | × | 서보 모터 | 쿠팡 | 아마존 | |
| 1 | × | 점퍼케이블 | 쿠팡 | 아마존 | |
| 1 | × | (추천) ESP8266용 스크루 터미널 확장 보드 | 쿠팡 | 아마존 |
서보 모터와 블루투스 모듈에 관하여
서보 모터, 블루투스 모듈, 핀아웃, 이들의 작동 방식 및 프로그래밍 방법을 잘 모르신다면, 다음 튜토리얼을 확인하여 더 많은 정보를 얻으시기 바랍니다:
선연결
서보 모터를 Classic Bluetooth로 관리하려면 HC-05 블루투스 모듈을 사용해야 합니다. 참조를 위한 배선도가 제공됩니다.
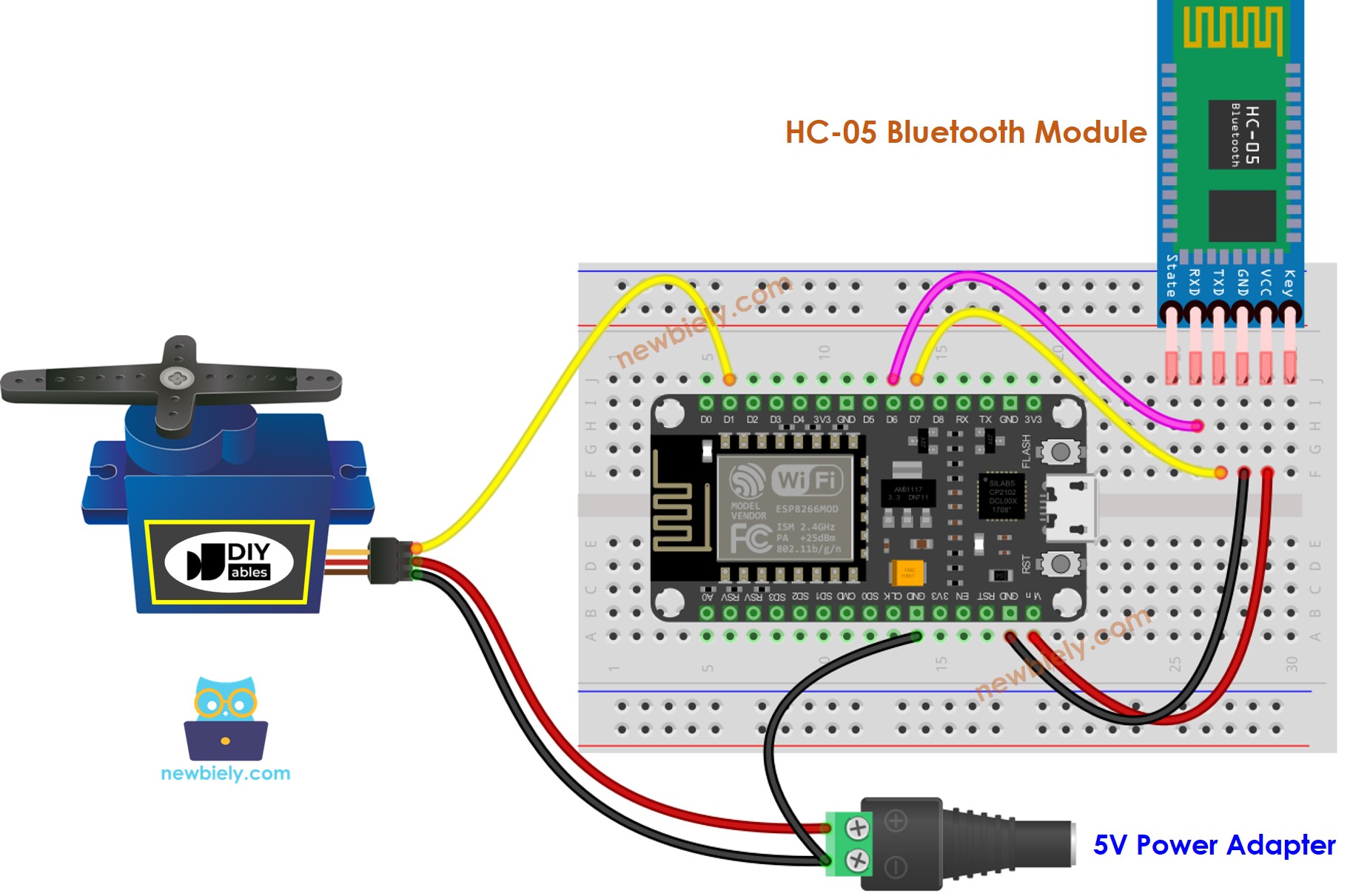
이 이미지는 Fritzing을 사용하여 만들어졌습니다. 이미지를 확대하려면 클릭하세요.
ESP8266 핀배열 및 ESP8266 전원을 켜는 방법에 대해 더 많이 보십시오.
서보 모터를 BLE로 관리하려면 HM-10 BLE 모듈을 사용해야 합니다. 참고할 수 있는 배선도가 제공됩니다.
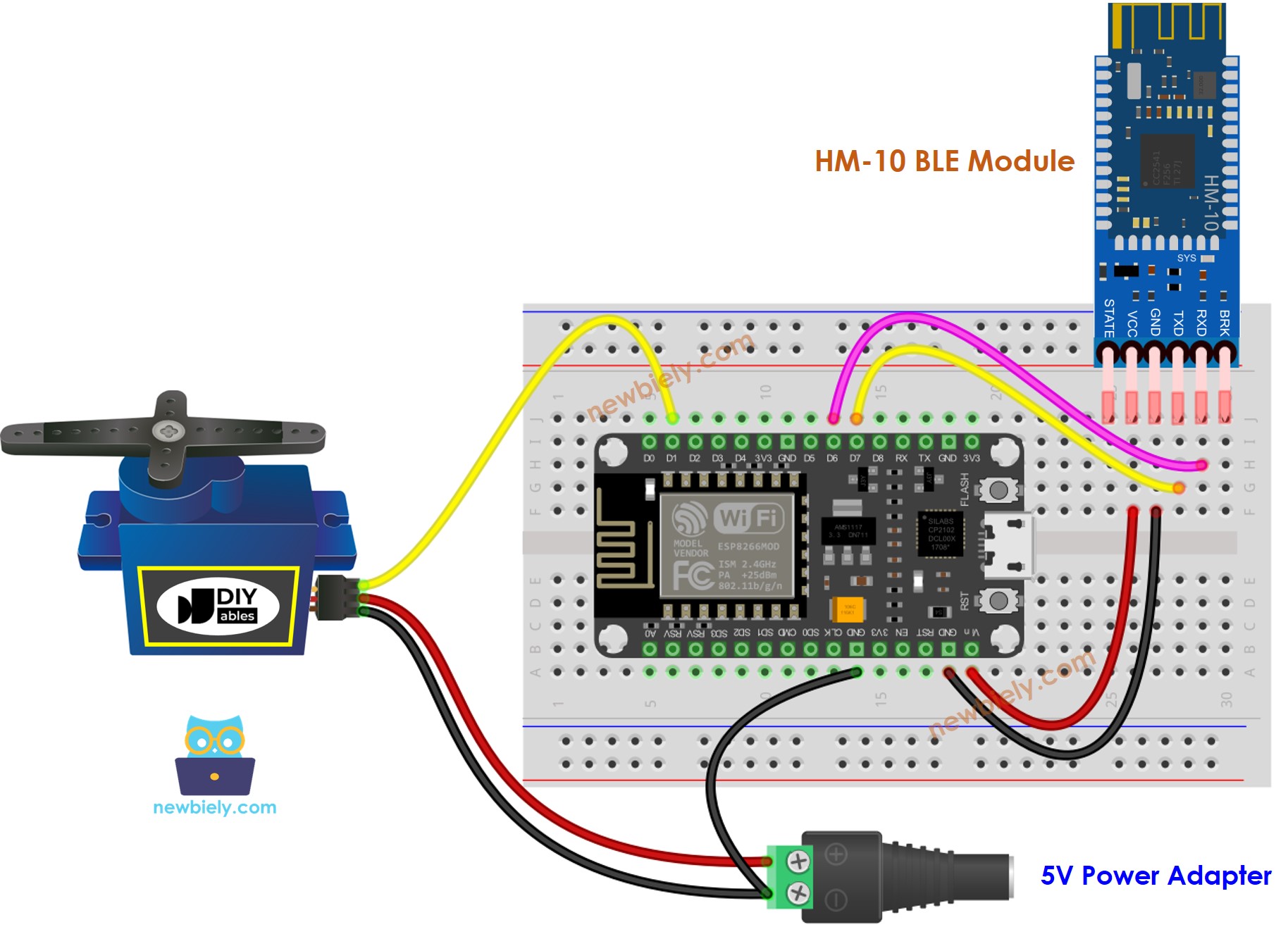
이 이미지는 Fritzing을 사용하여 만들어졌습니다. 이미지를 확대하려면 클릭하세요.
ESP8266 코드 - 블루투스/BLE를 통해 서보 모터 제어
다음 코드는 HC-10 블루투스 모듈과 HM-10 BLE 모듈 모두에 사용하기 적합합니다. 두 모듈 모두와 호환됩니다.
사용 방법
Arduino IDE에서 ESP8266을 시작하려면 다음 단계를 따르십시오:
- ESP8266을 처음 사용하는 경우 ESP8266 - 소프트웨어 설치 튜토리얼을 확인하세요.
- 다이어그램에 표시된 대로 구성 요소를 연결하세요.
- USB 케이블을 사용하여 ESP8266 보드를 컴퓨터에 연결하세요.
- 컴퓨터에서 Arduino IDE를 엽니다.
- 올바른 ESP8266 보드(예: NodeMCU 1.0 (ESP-12E Module))와 해당 COM 포트를 선택하세요.
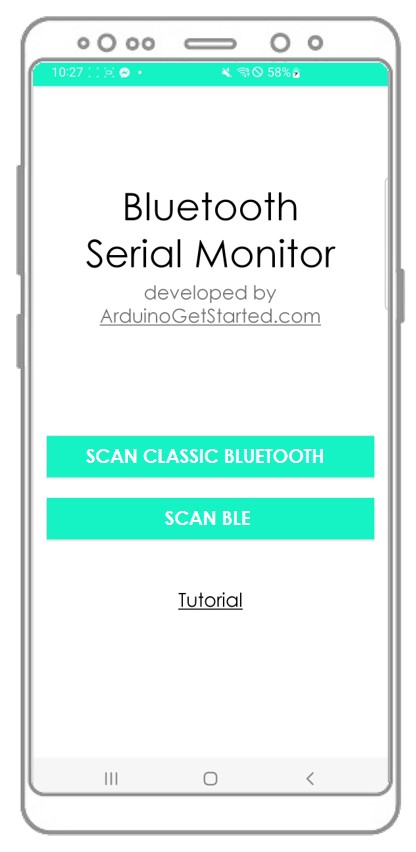
- 스마트폰에 블루투스 시리얼 모니터 앱을 다운로드하세요.
- 제공된 코드를 가져와서 Arduino IDE에서 열고, ESP8266 보드에 업로드하세요.
- 코드 업로드에 어려움을 겪는 경우, 블루투스 모듈의 TX 및 RX 핀을 분리한 후 코드를 업로드하고 나서 RX/TX 핀을 다시 연결해보세요.
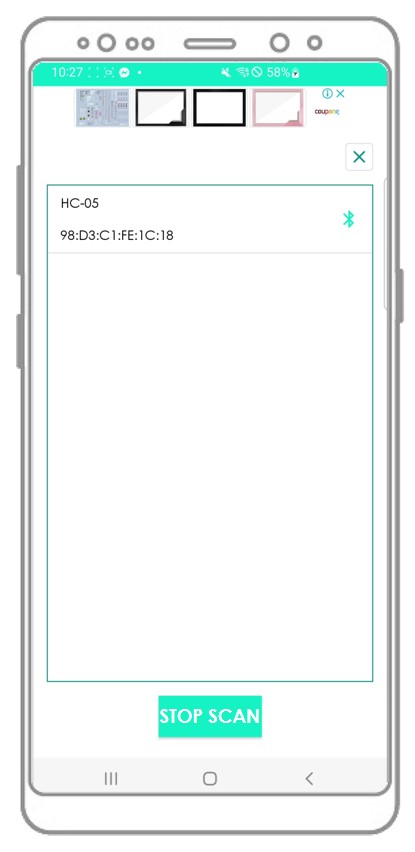
- 스마트폰에서 블루투스 시리얼 모니터 앱을 열고 사용 중인 모듈에 따라 클래식 블루투스 또는 BLE 옵션을 선택하세요.
앱을 HC-05 블루투스 모듈 또는 HM-10 BLE 모듈에 연결하십시오.
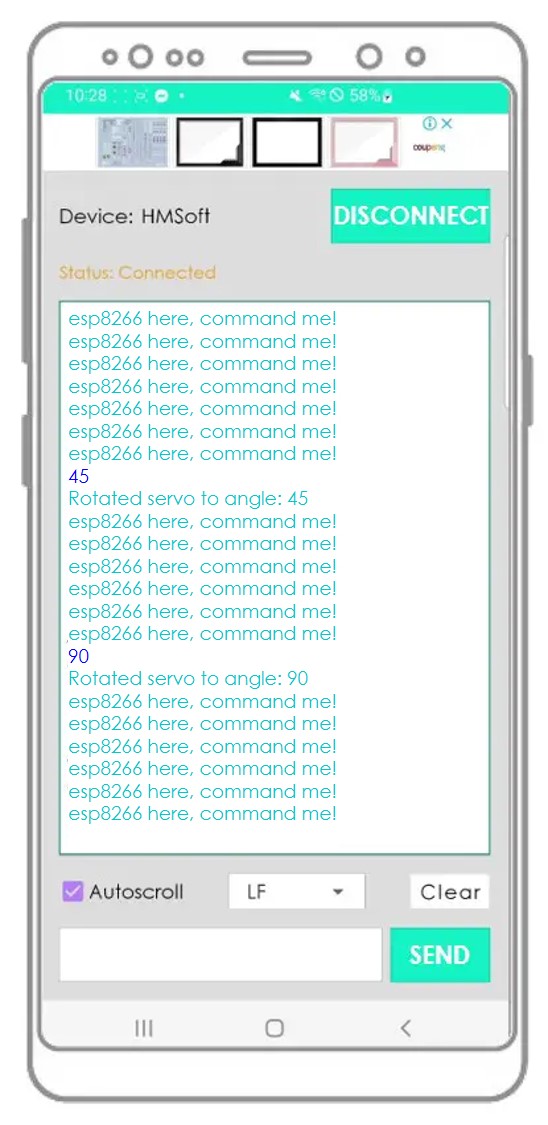
45나 90 같은 각도를 입력하고 SEND 버튼을 누르세요.
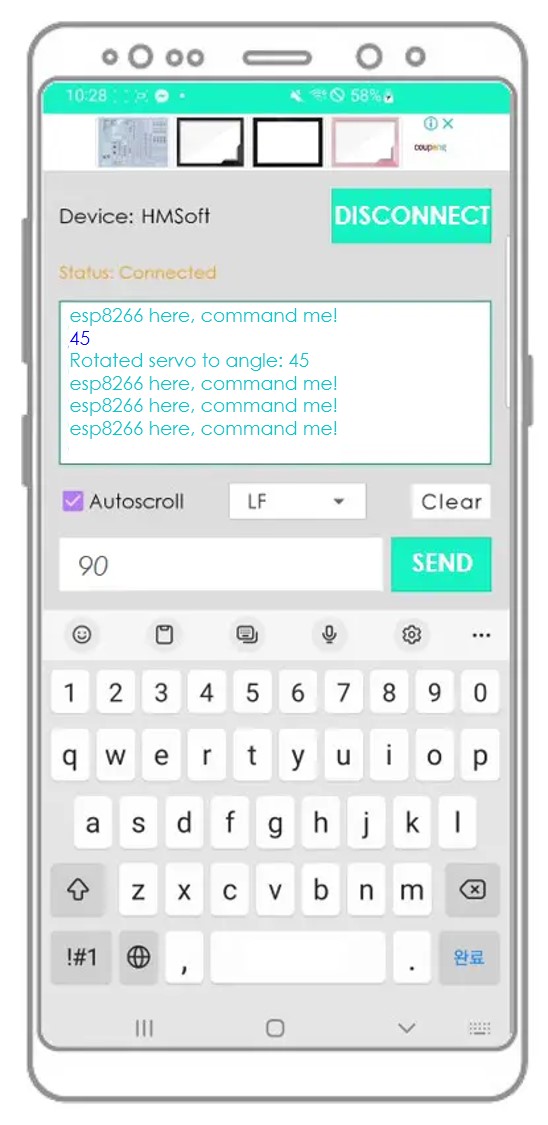
- 서보 모터의 각도 변화를 관찰하십시오.
- 안드로이드 앱에 미치는 영향을 검토하십시오.
블루투스 시리얼 모니터 앱이 유용하다고 생각되시면, 플레이 스토어에서 별 5개로 평가해 주세요. 지원해 주셔서 감사합니다!
동영상
비디오 제작은 시간이 많이 걸리는 작업입니다. 비디오 튜토리얼이 학습에 도움이 되었다면, YouTube 채널 을 구독하여 알려 주시기 바랍니다. 비디오에 대한 높은 수요가 있다면, 비디오를 만들기 위해 노력하겠습니다.



