ESP8266 가변 저항기 서보 모터
이 튜토리얼은 ESP8266을 사용하여 포텐시오미터에서 입력 값에 따라 서보 모터의 각도를 제어하는 방법을 알려줍니다. 자세히 살펴보면, 다음 사항을 배우게 됩니다:
- ESP8266에 가변 저항 및 서보 모터를 연결하는 방법
- 가변 저항의 값을 읽고 그에 따라 서보 모터를 제어하기 위해 ESP8266을 프로그래밍하는 방법
준비물
| 1 | × | Micro USB Cable | 아마존 | |
| 1 | × | ESP8266 NodeMCU | 쿠팡 | 아마존 | |
| 1 | × | USB 케이블 타입-A to 타입-C (USB-A PC용) | 쿠팡 | 아마존 | |
| 1 | × | USB 케이블 타입-C to 타입-C (USB-C PC용) | 아마존 | |
| 1 | × | 서보 모터 | 쿠팡 | 아마존 | |
| 1 | × | 포텐셔미터 | 쿠팡 | 아마존 | |
| 1 | × | 노브가 있는 포텐셔미터 모듈 | 쿠팡 | 아마존 | |
| 1 | × | 브레드보드 | 쿠팡 | 아마존 | |
| 1 | × | 점퍼케이블 | 쿠팡 | 아마존 | |
| 1 | × | (추천) ESP8266용 스크루 터미널 확장 보드 | 쿠팡 | 아마존 |
공개: 이 포스팅 에 제공된 일부 링크는 아마존 제휴 링크입니다. 이 포스팅은 쿠팡 파트너스 활동의 일환으로, 이에 따른 일정액의 수수료를 제공받습니다.
서보 모터와 포텐쇼미터에 대하여
서보 모터와 포텐쇼미터(핀배열, 작동 방식, 프로그래밍 포함)에 익숙하지 않다면, 다음 튜토리얼이 도움이 될 것입니다:
선연결
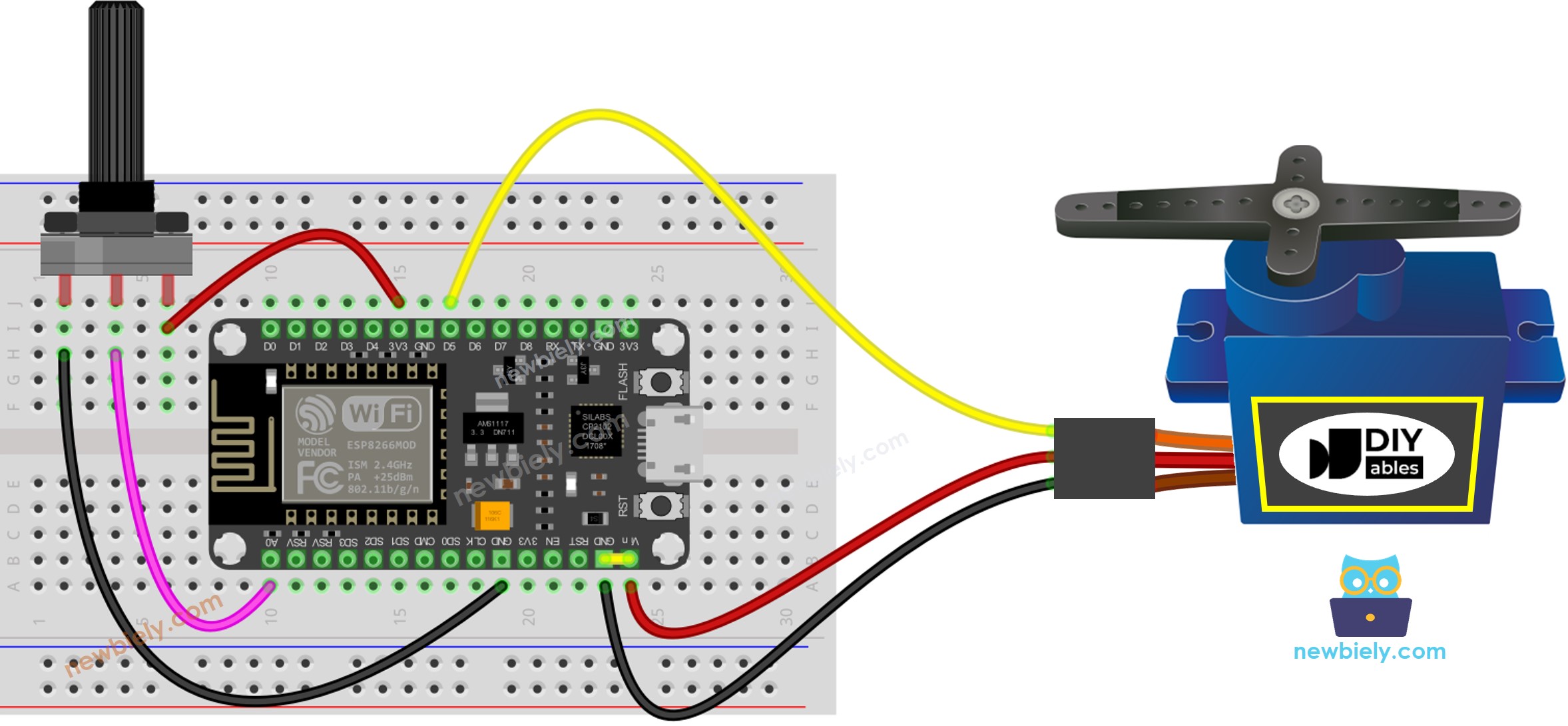
이 이미지는 Fritzing을 사용하여 만들어졌습니다. 이미지를 확대하려면 클릭하세요.
ESP8266 핀배열 및 ESP8266 전원을 켜는 방법에 대해 더 많이 보십시오.
간단함을 위해 위의 배선도는 테스트나 학습 목적 그리고 소형 토크 서보 모터용으로 사용됩니다. 실제로는 서보 모터를 위해 외부 전원 공급 장치를 사용하는 것이 강력히 권장됩니다. 아래의 배선도는 서보 모터를 외부 전원원에 연결하는 방법을 보여줍니다.
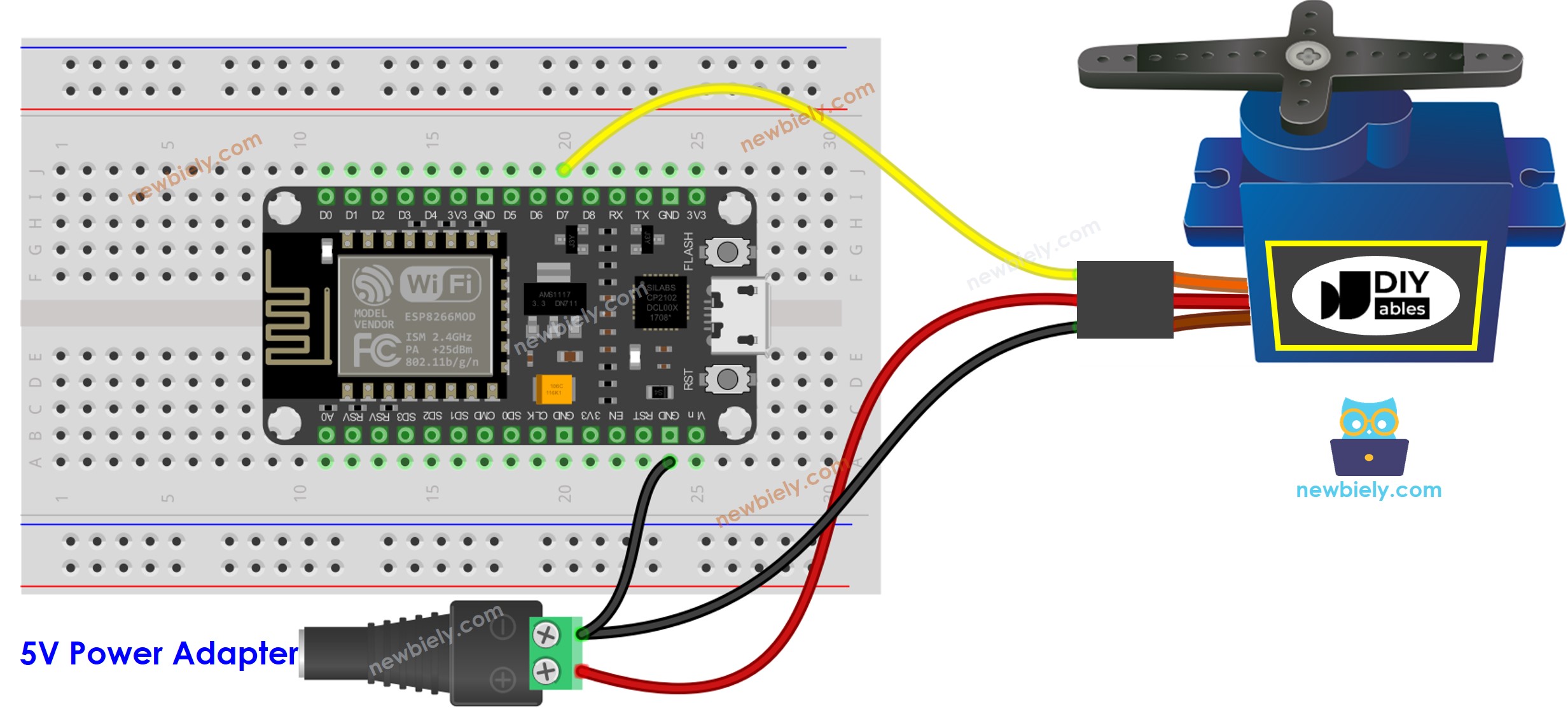
이 이미지는 Fritzing을 사용하여 만들어졌습니다. 이미지를 확대하려면 클릭하세요.
프로그램하는 방법
포텐시오미터에서 값을 읽어라 (0부터 1023까지 변화함)
int analog_value = analogRead(A0);
0에서 180 범위의 각도로 변환하세요.
int angle = map(analog_value, 0, 1023, 0, 180);
지정된 각도로 서보를 제어하십시오.
servo.write(angle);
ESP8266 코드
/*
* 이 ESP8266 NodeMCU 코드는 newbiely.kr 에서 개발되었습니다
* 이 ESP8266 NodeMCU 코드는 어떠한 제한 없이 공개 사용을 위해 제공됩니다.
* 상세한 지침 및 연결도에 대해서는 다음을 방문하세요:
* https://newbiely.kr/tutorials/esp8266/esp8266-potentiometer-servo-motor
*/
#include <Servo.h>
Servo servo; // 서보 객체를 생성하여 서보를 제어합니다.
void setup() {
// 시리얼 모니터와 통신하기 위해 시리얼을 초기화합니다.
Serial.begin(9600);
servo.attach(D5); // D5 핀에 서보를 서보 객체에 연결합니다.
}
void loop() {
// 포텐시오미터의 값을 읽습니다(0에서 1023 사이의 값).
int analog_value = analogRead(A0);
// 서보에서 사용할 수 있도록 값을 조정합니다(0에서 180 사이의 값).
int angle = map(analog_value, 0, 1023, 0, 180);
// 조정된 값에 따라 서보 위치를 설정합니다.
servo.write(angle);
// 값을 출력합니다.
Serial.print("Analog: ");
Serial.print(analog_value);
Serial.print(", Angle: ");
Serial.println(angle);
delay(100);
}
사용 방법
ESP8266을 Arduino IDE에서 시작하려면 다음 단계를 따르세요:
- ESP8266을 Arduino IDE에서 설정하는 방법에 대해 처음인 경우, ESP8266 설정 환경 구축 방법 튜토리얼을 확인하세요.
- 다이어그램에 표시된 대로 구성 요소를 연결하세요.
- USB 케이블을 사용하여 ESP8266 보드를 컴퓨터에 연결하세요.
- 컴퓨터에서 Arduino IDE를 엽니다.
- 올바른 ESP8266 보드를 선택하세요. 예를 들어, (NodeMCU 1.0 (ESP-12E Module)) 및 해당 COM 포트를 선택하세요.
- USB 케이블을 사용하여 ESP8266을 컴퓨터에 연결하세요.
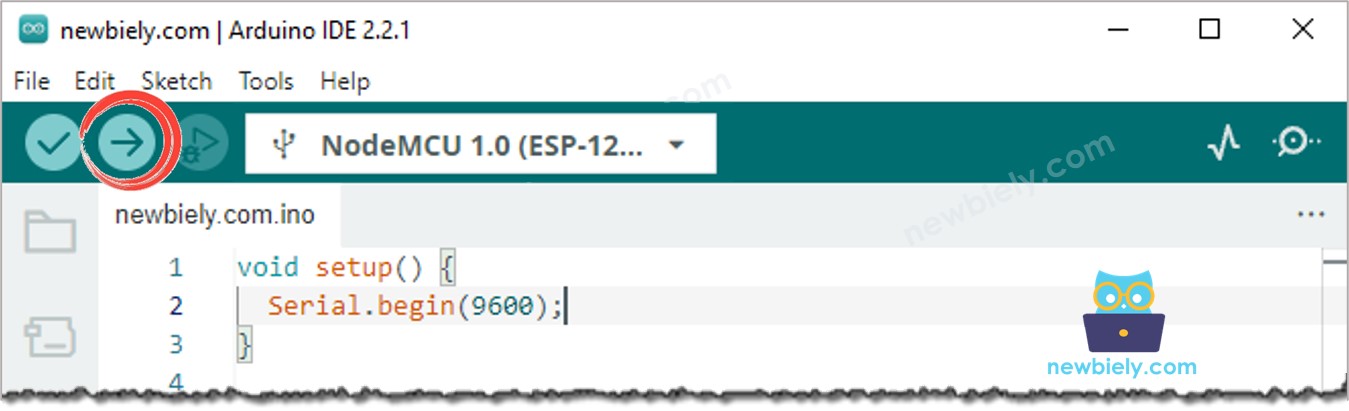
- Arduino IDE를 실행하고, 적절한 보드와 포트를 선택하세요.
- 위의 코드를 복사하고 Arduino IDE에서 엽니다.
- Arduino IDE에서 Upload 버튼을 클릭하여 코드를 ESP8266으로 전송하세요.
- 시리얼 모니터를 엽니다
- 저항을 돌려주세요
- 서보 모터의 회전을 확인하세요
- 시리얼 모니터에서 결과를 확인하세요
8
Serial.println("Hello World!");
Message (Enter to send message to 'Nodemcu 1.0 (ESP-12E Module)' on 'COM15')
New Line
9600 baud
Analog: 0, Angle: 0
Analog: 85, Angle: 14
Analog: 201, Angle: 35
Analog: 286, Angle: 50
Analog: 370, Angle: 65
Analog: 444, Angle: 78
Analog: 521, Angle: 91
Analog: 608, Angle: 106
Analog: 690, Angle: 121
Analog: 793, Angle: 139
Analog: 907, Angle: 159
Analog: 1023, Angle: 180
Analog: 1023, Angle: 180
코드 설명
소스 코드의 주석에 포함된 줄마다의 설명을 확인하세요!
동영상
비디오 제작은 시간이 많이 걸리는 작업입니다. 비디오 튜토리얼이 학습에 도움이 되었다면, YouTube 채널 을 구독하여 알려 주시기 바랍니다. 비디오에 대한 높은 수요가 있다면, 비디오를 만들기 위해 노력하겠습니다.



