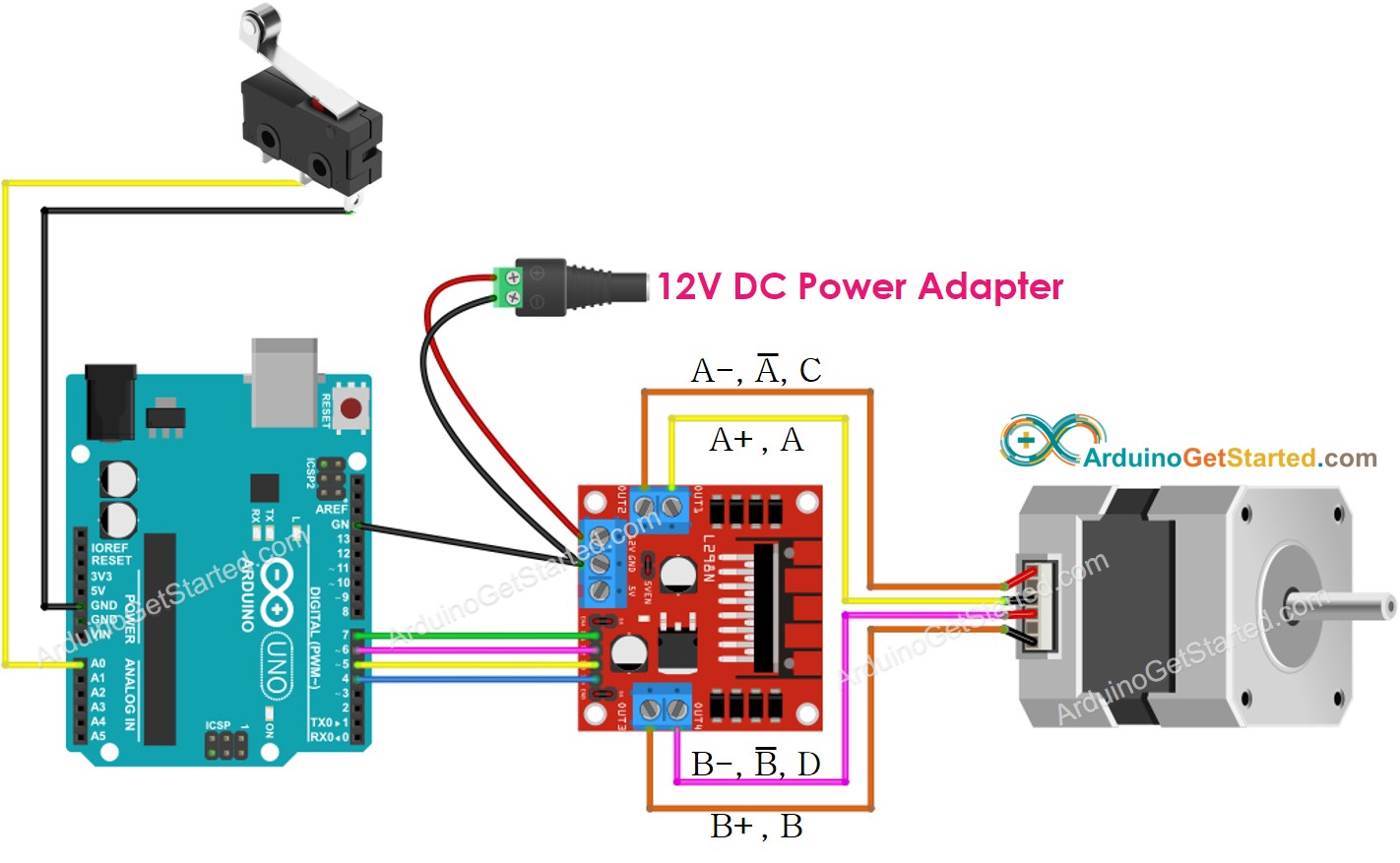
스텝 모터에 따라 스텝 모터와 L298N 사이의 배선 연결이 다를 수 있습니다. 스텝 모터를 L298N 모터 드라이버에 어떻게 연결하는지 알아보려면 이 아두이노 - L298N 드라이버를 이용한 스테퍼 모터 제어 튜토리얼을 자세히 살펴보시기 바랍니다.
아두이노 코드 - 리미트 스위치로 스테퍼 모터 멈추기
스텝 모터를 정지시키는 몇 가지 방법이 있습니다:
stepper.stop() 함수를 호출하십시오: 이 방법은 스테퍼 모터를 즉각적으로 멈추지 않고 점차적으로 멈춥니다
stepper.run() 함수를 호출하지 마십시오: 이 방법은 스테퍼 모터를 즉각 멈춥니다
아래 코드는 스테퍼 모터가 무한히 회전하게 하고 리미트 스위치에 닿는 즉시 정지하게 합니다.
/* * 이 아두이노 코드는 newbiely.kr 에서 개발되었습니다 * 이 아두이노 코드는 어떠한 제한 없이 공개 사용을 위해 제공됩니다. * 상세한 지침 및 연결도에 대해서는 다음을 방문하세요: * https://newbiely.kr/tutorials/arduino/arduino-stepper-motor-and-limit-switch */#include <ezButton.h>#include <AccelStepper.h>#define MAX_POSITION 0x7FFFFFFF // 최대로 설정할 수 있는 위치 (long 타입)ezButton limitSwitch(A0); // A0 핀에 연결된 ezButton 객체 생성;AccelStepper stepper(AccelStepper::FULL4WIRE, 7, 6, 5, 4);bool isStopped = false;voidsetup() {Serial.begin(9600); limitSwitch.setDebounceTime(50); // 디바운스 시간을 50 밀리초로 설정 stepper.setMaxSpeed(500.0); // 최대 속도 설정 stepper.setAcceleration(50.0); // 가속도 설정 stepper.setSpeed(100); // 초기 속도 설정 stepper.setCurrentPosition(0); // 위치 설정 stepper.moveTo(MAX_POSITION);}voidloop() { limitSwitch.loop(); // 반드시 loop() 함수를 먼저 호출해야 함if (limitSwitch.isPressed()) {Serial.println(F("The limit switch: TOUCHED")); isStopped = true; }if (isStopped == false) {// 이 부분이 없으면, 최대 위치에 도달한 후 움직임이 멈춤if (stepper.distanceToGo() == 0) { // 모터가 최대 위치로 이동했으면 stepper.setCurrentPosition(0); // 위치를 0으로 재설정 stepper.moveTo(MAX_POSITION); // 모터를 다시 최대 위치로 이동 } stepper.run(); // 반드시 loop() 함수 안에서 호출되어야 함 } else {// stepper.run() 함수를 호출하지 않으면, 모터가 즉시 멈춤// 참고: stepper.stop() 함수는 모터를 즉시 멈추지 않음Serial.println(F("The stepper motor is STOPPED")); }}
사용 방법
아두이노를 USB 케이블을 통해 PC에 연결하세요.
아두이노 IDE를 열고, 올바른 보드와 포트를 선택하세요.
아두이노 IDE의 왼쪽 바에 있는 Libraries 아이콘으로 이동하세요.
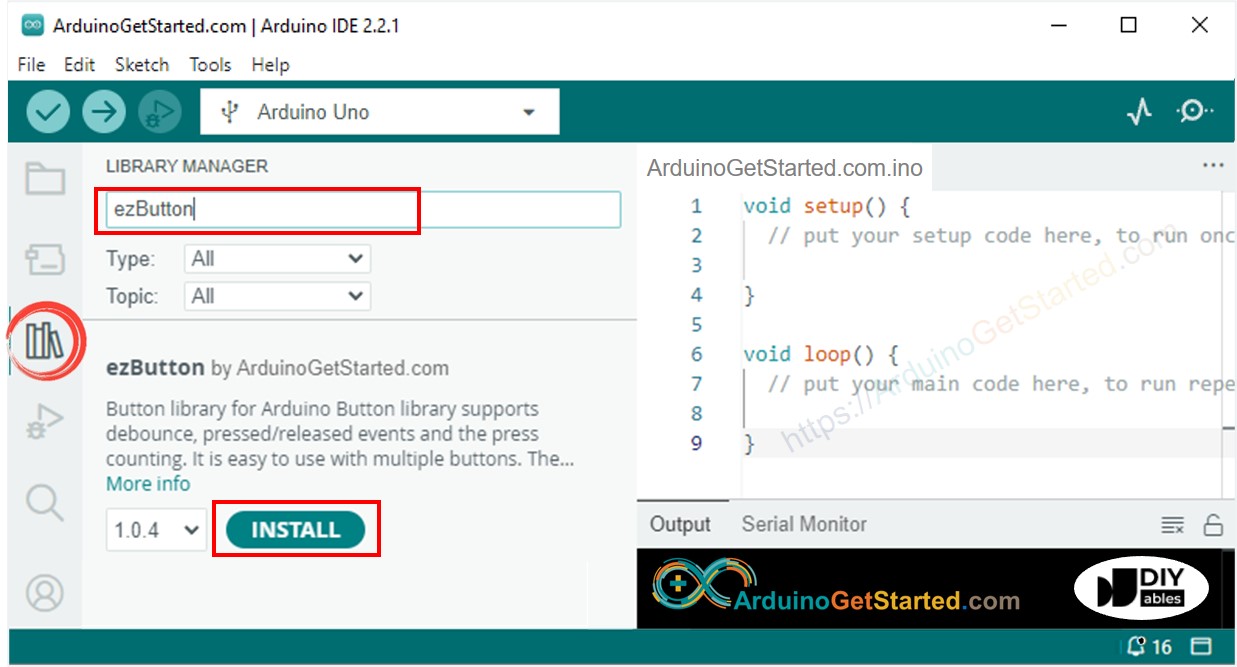
“ezButton”을 검색하고, ArduinoGetStarted.com에서 만든 버튼 라이브러리를 찾으세요.
EzButton 라이브러리를 설치하려면 Install 버튼을 클릭하세요.
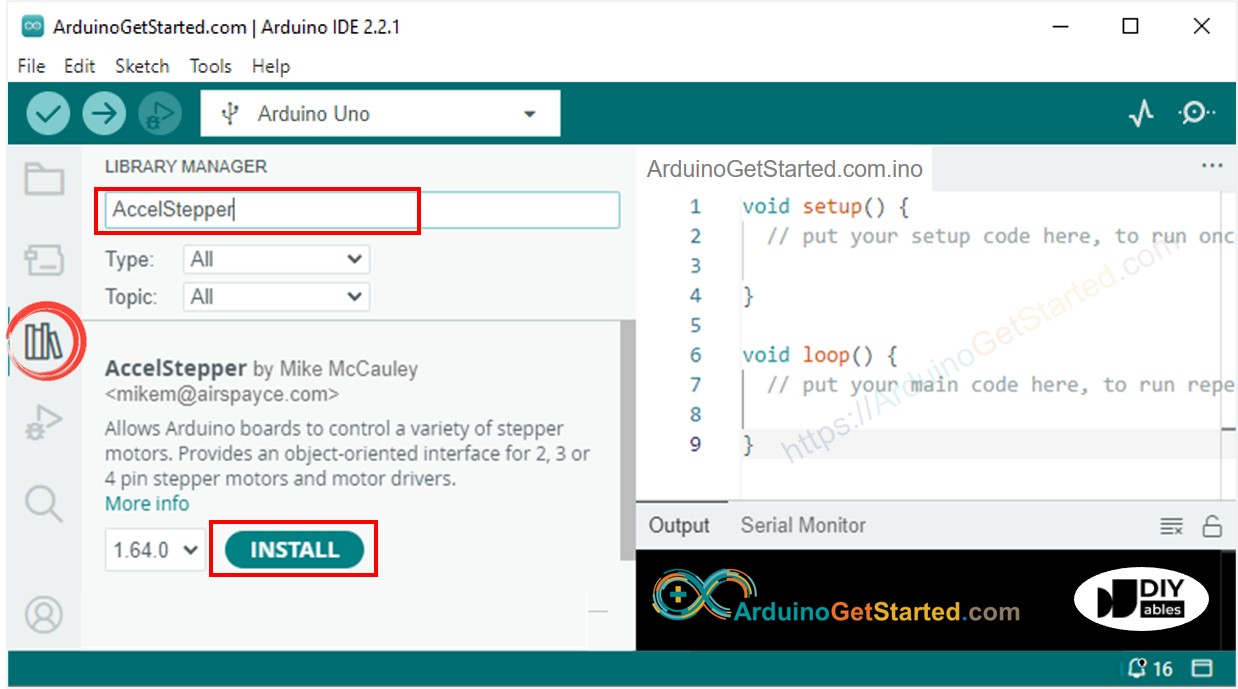
“AccelStepper”을 검색한 다음, Mike McCauley가 만든 AccelStepper 라이브러리를 찾으세요.
AccelStepper 라이브러리를 설치하려면 Install 버튼을 클릭하세요.
위의 코드를 복사하고 Arduino IDE로 엽니다
Arduino IDE에서 Upload 버튼을 클릭하여 코드를 Arduino에 업로드합니다
배선이 올바른 경우, 모터가 시계 방향으로 회전하는 것을 볼 수 있습니다.
리미트 스위치를 만지십시오
모터가 즉시 멈추는 것을 볼 수 있습니다
시리얼 모니터의 결과는 아래와 같습니다
Newbiely | Arduino IDE 2.3.8
──
☐
✕
File
Edit
Sketch
Tools
Help
Arduino Uno
Newbiely.ino
···
8Serial.println("Hello World!");
Output
Serial Monitor
Message (Enter to send message to 'Arduino Uno' on 'COM15')
New Line
9600 baud
The limit switch: TOUCHED
The stepper motor is STOPPED
The stepper motor is STOPPED
The stepper motor is STOPPED
The stepper motor is STOPPED
Ln 11, Col 1
Arduino Uno on COM15
2
코드 설명
위의 아두이노 코드의 주석 라인에서 설명을 찾을 수 있습니다.
아두이노 코드 - 리미트 스위치로 스테퍼 모터의 방향 변경
아래 코드는 스텝 모터가 무한히 회전하게 만들고, 리미트 스위치가 닿았을 때 방향을 변경합니다.
/* * 이 아두이노 코드는 newbiely.kr 에서 개발되었습니다 * 이 아두이노 코드는 어떠한 제한 없이 공개 사용을 위해 제공됩니다. * 상세한 지침 및 연결도에 대해서는 다음을 방문하세요: * https://newbiely.kr/tutorials/arduino/arduino-stepper-motor-and-limit-switch */#include <ezButton.h>#include <AccelStepper.h>#define DIRECTION_CCW -1#define DIRECTION_CW 1#define MAX_POSITION 0x7FFFFFFF // 최대 설정 가능 위치 (long 타입)ezButton limitSwitch(A0); // A0 핀에 연결된 ezButton 객체 생성;AccelStepper stepper(AccelStepper::FULL4WIRE, 7, 6, 5, 4);intdirection = DIRECTION_CW;long targetPos = 0;voidsetup() {Serial.begin(9600); limitSwitch.setDebounceTime(50); // 디바운스 시간을 50 밀리초로 설정 stepper.setMaxSpeed(500.0); // 최대 속도 설정 stepper.setAcceleration(50.0); // 가속도 설정 stepper.setSpeed(100); // 초기 속도 설정 stepper.setCurrentPosition(0); // 위치 설정 targetPos = direction * MAX_POSITION; stepper.moveTo(targetPos);}voidloop() { limitSwitch.loop(); // loop() 함수는 반드시 호출되어야 함if (limitSwitch.isPressed()) {Serial.println(F("The limit switch: TOUCHED"));direction *= -1; // 방향 변경Serial.print(F("The direction -> "));if (direction == DIRECTION_CW)Serial.println(F("CLOCKWISE"));elseSerial.println(F("ANTI-CLOCKWISE")); targetPos = direction * MAX_POSITION; stepper.setCurrentPosition(0); // 위치 설정 stepper.moveTo(targetPos); }// 이 부분 없이는 최대 위치에 도달한 후 움직임이 멈춤if (stepper.distanceToGo() == 0) { // 모터가 최대 위치까지 움직였으면 stepper.setCurrentPosition(0); // 위치를 0으로 재설정 stepper.moveTo(targetPos); // 모터를 다시 최대 위치까지 움직임 } stepper.run(); // loop() 함수 안에서 반드시 호출되어야 함}
사용 방법
위의 코드를 복사하고 아두이노 IDE로 열기
아두이노 IDE에서 Upload 버튼을 클릭하여 코드를 아두이노에 업로드합니다.
배선이 올바르면 모터가 시계 방향으로 회전하는 것을 볼 수 있습니다.
리미트 스위치를 누름
스테퍼 모터의 방향이 반시계 방향으로 바뀐 것을 볼 수 있습니다.
리미트 스위치를 다시 누름
스테퍼 모터의 방향이 시계 방향으로 바뀐 것을 볼 수 있습니다.
시리얼 모니터의 결과는 아래와 같습니다.
Newbiely | Arduino IDE 2.3.8
──
☐
✕
File
Edit
Sketch
Tools
Help
Arduino Uno
Newbiely.ino
···
8Serial.println("Hello World!");
Output
Serial Monitor
Message (Enter to send message to 'Arduino Uno' on 'COM15')
New Line
9600 baud
The limit switch: TOUCHED
The direction -> ANTI-CLOCKWISE
The limit switch: TOUCHED
The direction -> CLOCKWISE
Ln 11, Col 1
Arduino Uno on COM15
2
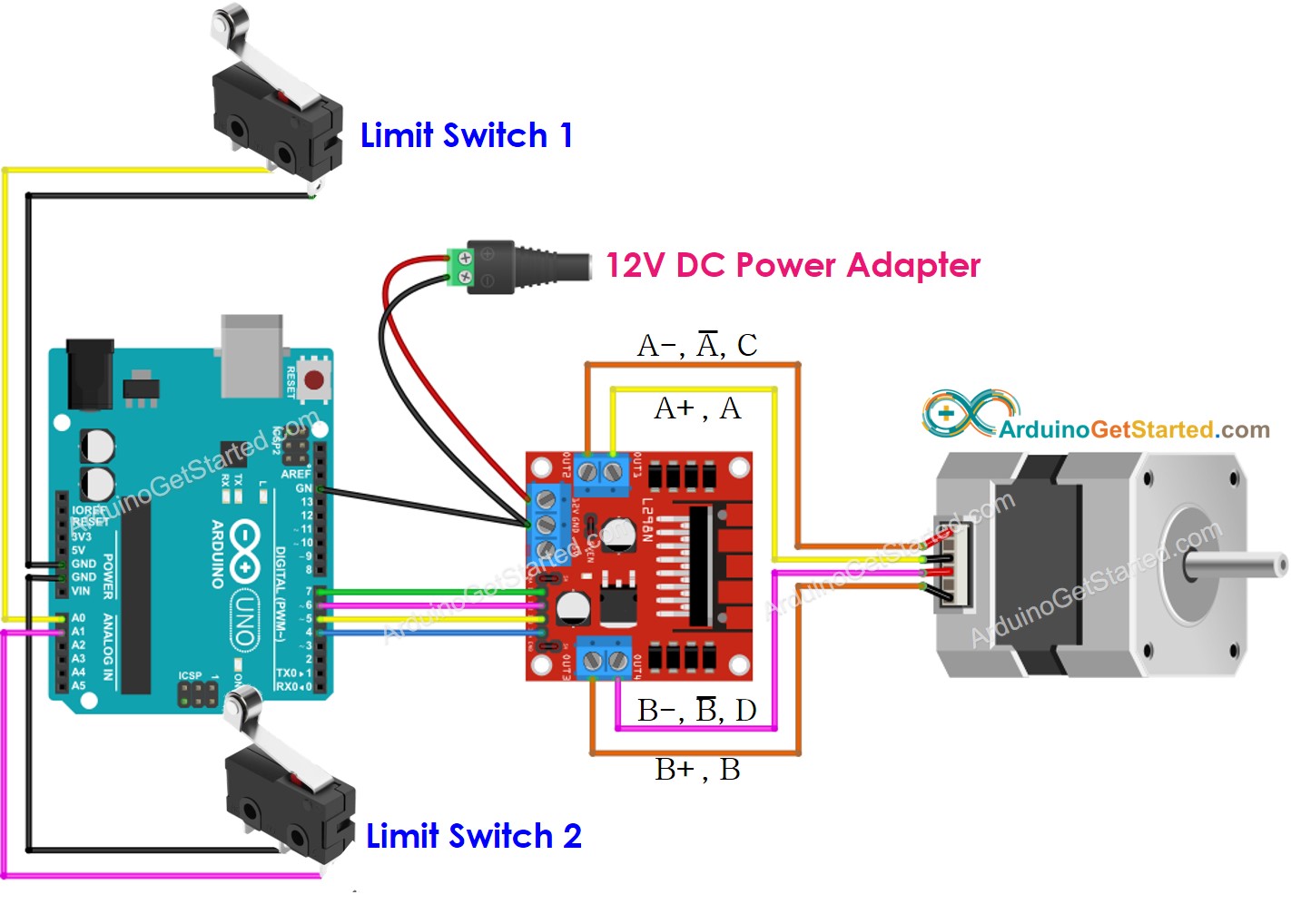
아두이노 코드 - 두 개의 리미트 스위치로 스테퍼 모터의 방향 변경
아래 코드는 스테퍼 모터가 무한히 회전하게 하며, 두 개의 한계 스위치 중 하나가 접촉되면 그 방향을 바꾸게 합니다.
/* * 이 아두이노 코드는 newbiely.kr 에서 개발되었습니다 * 이 아두이노 코드는 어떠한 제한 없이 공개 사용을 위해 제공됩니다. * 상세한 지침 및 연결도에 대해서는 다음을 방문하세요: * https://newbiely.kr/tutorials/arduino/arduino-stepper-motor-and-limit-switch */#include <ezButton.h>#include <AccelStepper.h>#define DIRECTION_CCW -1#define DIRECTION_CW 1#define STATE_CHANGE_DIR 1#define STATE_MOVE 2#define STATE_MOVING 3#define MAX_POSITION 0x7FFFFFFF // maximum of position we can set (long type)ezButton limitSwitch_1(A0); // 핀 A0에 연결된 ezButton 객체를 생성합니다;ezButton limitSwitch_2(A1); // 핀 A1에 연결된 ezButton 객체를 생성합니다;AccelStepper stepper(AccelStepper::FULL4WIRE, 7, 6, 5, 4);int stepperState = STATE_MOVE;intdirection = DIRECTION_CW;long targetPos = 0;voidsetup() {Serial.begin(9600); limitSwitch_1.setDebounceTime(50); // 디바운스 시간을 50 밀리초로 설정 limitSwitch_2.setDebounceTime(50); // 디바운스 시간을 50 밀리초로 설정 stepper.setMaxSpeed(500.0); // 최대 속도 설정 stepper.setAcceleration(50.0); // 가속도 설정 stepper.setSpeed(100); // 초기 속도 설정 stepper.setCurrentPosition(0); // 위치 설정}voidloop() { limitSwitch_1.loop(); // loop() 함수를 먼저 호출해야 함 limitSwitch_2.loop(); // loop() 함수를 먼저 호출해야 함if (limitSwitch_1.isPressed()) { stepperState = STATE_CHANGE_DIR;Serial.println(F("The limit switch 1: TOUCHED")); }if (limitSwitch_2.isPressed()) { stepperState = STATE_CHANGE_DIR;Serial.println(F("The limit switch 2: TOUCHED")); }switch (stepperState) {case STATE_CHANGE_DIR:direction *= -1; // 방향 변경Serial.print(F("The direction -> "));if (direction == DIRECTION_CW)Serial.println(F("CLOCKWISE"));elseSerial.println(F("ANTI-CLOCKWISE")); stepperState = STATE_MOVE; // 방향을 변경한 후, 모터를 이동시키기 위해 다음 상태로 전환break;case STATE_MOVE: targetPos = direction * MAX_POSITION; stepper.setCurrentPosition(0); // 위치 설정 stepper.moveTo(targetPos); stepperState = STATE_MOVING; // 이동한 후, 모터를 무한히 계속 움직이기 위해 다음 상태로 전환break;case STATE_MOVING: // 이 상태가 없으면, 최대 위치에 도달한 후 이동이 멈춤if (stepper.distanceToGo() == 0) { // 모터가 최대 위치로 이동했으면 stepper.setCurrentPosition(0); // 위치를 0으로 다시 설정 stepper.moveTo(targetPos); // 모터를 다시 최대 위치로 이동 }break; } stepper.run(); // loop() 함수에서 반드시 호출해야 함}
사용 방법
위의 코드를 복사하고 Arduino IDE를 열어주세요
Arduino IDE에서 Upload 버튼을 클릭하여 코드를 Arduino에 업로드하세요
배선이 올바르면 모터가 시계 방향으로 회전하는 것을 볼 수 있습니다.
리미트 스위치 1을 터치하세요
스테퍼 모터의 방향이 반시계 방향으로 변경된 것을 볼 수 있습니다
리미트 스위치 2를 터치하세요
스테퍼 모터의 방향이 시계 방향으로 변경된 것을 볼 수 있습니다
시리얼 모니터의 결과는 아래와 같습니다
Newbiely | Arduino IDE 2.3.8
──
☐
✕
File
Edit
Sketch
Tools
Help
Arduino Uno
Newbiely.ino
···
8Serial.println("Hello World!");
Output
Serial Monitor
Message (Enter to send message to 'Arduino Uno' on 'COM15')
New Line
9600 baud
The limit switch 1: TOUCHED
The direction -> ANTI-CLOCKWISE
The limit switch 2: TOUCHED
The direction -> CLOCKWISE
Ln 11, Col 1
Arduino Uno on COM15
2
동영상
비디오 제작은 시간이 많이 걸리는 작업입니다. 비디오 튜토리얼이 학습에 도움이 되었다면, YouTube 채널 을 구독하여 알려 주시기 바랍니다. 비디오에 대한 높은 수요가 있다면, 비디오를 만들기 위해 노력하겠습니다.