아두이노 버튼 서보 모터
우리는 배울 것입니다:
- 버튼이 눌리면 서보 모터를 90도 회전시킵니다.
- 버튼이 다시 눌리면 서보 모터를 다시 0도로 회전시킵니다.
그 과정이 반복됩니다.
튜토리얼은 두 가지 주요 부분을 포함합니다:
- 버튼이 디바운싱 없이 서보 모터를 제어합니다.
- 버튼이 디바운싱으로 서보 모터를 제어합니다.
준비물
| 1 | × | 아두이노 우노 R3 | 쿠팡 | 아마존 | |
| 1 | × | USB 2.0 타입 A-to-B 케이블 (USB-A PC용) | 쿠팡 | 아마존 | |
| 1 | × | USB 2.0 타입 C-to-B 케이블 (USB-C PC용) | 아마존 | |
| 1 | × | 버튼 키트 | 쿠팡 | 아마존 | |
| 1 | × | 패널 장착 푸시 버튼 | 아마존 | |
| 1 | × | 푸시 버튼 모듈 | 아마존 | |
| 1 | × | 서보 모터 | 쿠팡 | 아마존 | |
| 1 | × | 브레드보드 | 쿠팡 | 아마존 | |
| 1 | × | 점퍼케이블 | 쿠팡 | 아마존 | |
| 1 | × | (추천) 아두이노 우노용 스크루 터미널 블록 쉴드 | 쿠팡 | 아마존 | |
| 1 | × | (추천) Sensors/Servo Expansion Shield for Arduino Uno | 쿠팡 | 아마존 | |
| 1 | × | (추천) 아두이노 우노용 브레드보드 쉴드 | 쿠팡 | 아마존 | |
| 1 | × | (추천) 아두이노 우노용 케이스 | 쿠팡 | 아마존 | |
| 1 | × | (추천) 아두이노 우노용 프로토타이핑 베이스 플레이트 & 브레드보드 키트 | 아마존 |
공개: 이 포스팅 에 제공된 일부 링크는 아마존 제휴 링크입니다. 이 포스팅은 쿠팡 파트너스 활동의 일환으로, 이에 따른 일정액의 수수료를 제공받습니다.
서보 모터와 버튼에 대하여
서보 모터와 버튼(핀아웃, 작동 방식, 프로그래밍 방법 등)에 대해 잘 모른다면, 다음 튜토리얼에서 이에 대해 배워보세요:
선연결
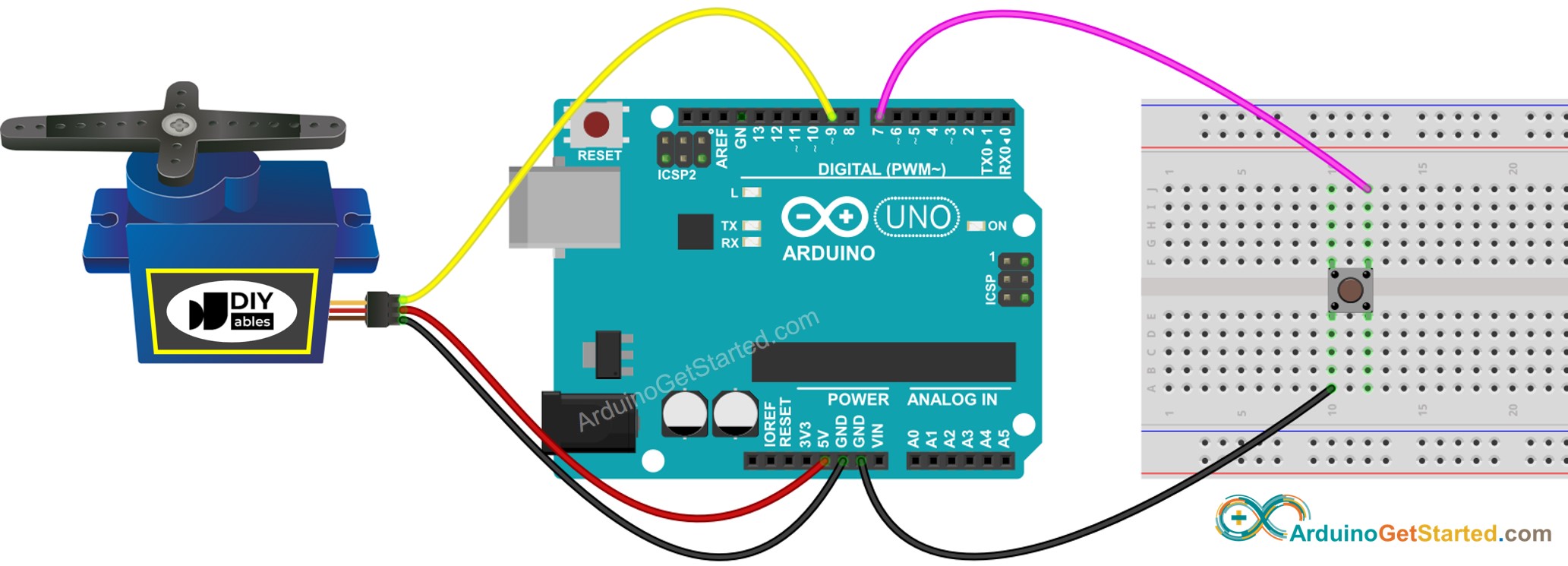
이 이미지는 Fritzing을 사용하여 만들어졌습니다. 이미지를 확대하려면 클릭하세요.
아두이노 코드 - 디바운싱 없이 버튼으로 서보 모터 제어
/*
* 이 아두이노 코드는 newbiely.kr 에서 개발되었습니다
* 이 아두이노 코드는 어떠한 제한 없이 공개 사용을 위해 제공됩니다.
* 상세한 지침 및 연결도에 대해서는 다음을 방문하세요:
* https://newbiely.kr/tutorials/arduino/arduino-button-servo-motor
*/
#include <Servo.h>
// 상수는 변경되지 않습니다.
const int BUTTON_PIN = 7; // 버튼의 핀에 연결된 아두이노 핀
const int SERVO_PIN = 9; // 서보 모터의 핀에 연결된 아두이노 핀
Servo servo; // 서보 제어를 위한 서보 객체 생성
// 변수는 변경될 것입니다:
int angle = 0; // 서보 모터의 현재 각도
int lastButtonState; // 버튼의 이전 상태
int currentButtonState; // 버튼의 현재 상태
void setup() {
Serial.begin(9600); // 시리얼 초기화
pinMode(BUTTON_PIN, INPUT_PULLUP); // 아두이노 핀을 입력 풀업 모드로 설정
servo.attach(SERVO_PIN); // 핀 9에 있는 서보를 서보 객체에 첨부
servo.write(angle);
currentButtonState = digitalRead(BUTTON_PIN);
}
void loop() {
lastButtonState = currentButtonState; // 마지막 상태 저장
currentButtonState = digitalRead(BUTTON_PIN); // 새로운 상태 읽기
if(lastButtonState == HIGH && currentButtonState == LOW) {
Serial.println("The button is pressed");
// 서보 모터의 각도 변경
if(angle == 0)
angle = 90;
else
if(angle == 90)
angle = 0;
// 각도에 따라 서보 모터 제어
servo.write(angle);
}
}
사용 방법
- 아두이노를 USB 케이블을 통해 PC에 연결합니다
- 아두이노 IDE를 열고, 올바른 보드와 포트를 선택합니다
- 위의 코드를 복사하고 아두이노 IDE로 엽니다
- 아두이노 IDE에서 Upload 버튼을 클릭하여 코드를 아두이노에 업로드합니다
- 버튼을 여러 번 누릅니다.
- 서보 모터의 변화를 확인합니다
※ 주의:
실제로, 위의 코드는 가끔 제대로 작동하지 않습니다. 이를 항상 제대로 작동시키기 위해서는 아두이노 - 버튼 - 디벗싱해야 합니다. 버튼을 디바운스하는 것은 초보자에게 쉽지 않습니다. 다행히도, ezButton 라이브러리 덕분에 우리는 쉽게 할 수 있습니다.
아두이노 코드 - 디바운싱으로 버튼이 서보 모터를 제어합니다
우리는 디바운싱이 왜 필요한가요? ⇒ 아두이노 - 버튼 - 디벗싱을 확인하세요.
/*
* 이 아두이노 코드는 newbiely.kr 에서 개발되었습니다
* 이 아두이노 코드는 어떠한 제한 없이 공개 사용을 위해 제공됩니다.
* 상세한 지침 및 연결도에 대해서는 다음을 방문하세요:
* https://newbiely.kr/tutorials/arduino/arduino-button-servo-motor
*/
#include <Servo.h>
#include <ezButton.h>
// 변하지 않는 상수들
const int BUTTON_PIN = 7; // 버튼의 핀에 연결된 Arduino 핀
const int SERVO_PIN = 9; // 서보 모터의 핀에 연결된 Arduino 핀
ezButton button(BUTTON_PIN); // 핀 7에 연결된 ezButton 객체를 생성;
Servo servo; // 서보를 제어하기 위한 서보 객체 생성
// 변경될 변수들:
int angle = 0; // 서보 모터의 현재 각도
void setup() {
Serial.begin(9600); // 시리얼 초기화
button.setDebounceTime(50); // 디바운스 시간을 50 밀리초로 설정
servo.attach(SERVO_PIN); // 서보 객체에 핀 9를 붙임
servo.write(angle);
}
void loop() {
button.loop(); // 반드시 loop() 함수를 먼저 호출해야 함
if(button.isPressed()) {
Serial.println("The button is pressed");
// 서보 모터의 각도 변경
if(angle == 0)
angle = 90;
else
if(angle == 90)
angle = 0;
// 각도에 따라 서보 모터 제어
servo.write(angle);
}
}
사용 방법
- EzButton 라이브러리를 설치하세요. 방법 보기
- 위의 코드를 복사하고 Arduino IDE로 열기
- Arduino IDE에서 Upload 버튼을 클릭하여 코드를 Arduino에 업로드합니다
- 버튼을 여러 번 누르세요
- 서보 모터의 변화를 확인하세요
동영상
비디오 제작은 시간이 많이 걸리는 작업입니다. 비디오 튜토리얼이 학습에 도움이 되었다면, YouTube 채널 을 구독하여 알려 주시기 바랍니다. 비디오에 대한 높은 수요가 있다면, 비디오를 만들기 위해 노력하겠습니다.



