아두이노 GPS
이 튜토리얼에서는 NEO-6M GPS 모듈에서 GPS 좌표(경도, 위도, 고도), GPS 속도(km/h), 날짜 및 시간을 얻는 방법을 배우게 됩니다. 또한, 현재 GPS 위치로부터 사전 정의된 GPS 좌표(예: 런던의 좌표)까지의 거리를 계산하는 방법도 배우게 됩니다.
준비물
| 1 | × | 아두이노 우노 R3 | 쿠팡 | 아마존 | |
| 1 | × | USB 2.0 타입 A-to-B 케이블 (USB-A PC용) | 쿠팡 | 아마존 | |
| 1 | × | USB 2.0 타입 C-to-B 케이블 (USB-C PC용) | 아마존 | |
| 1 | × | NEO-6M GPS module | 아마존 | |
| 1 | × | 점퍼케이블 | 쿠팡 | 아마존 | |
| 1 | × | (추천) 아두이노 우노용 스크루 터미널 블록 쉴드 | 쿠팡 | 아마존 | |
| 1 | × | (추천) Sensors/Servo Expansion Shield for Arduino Uno | 쿠팡 | 아마존 | |
| 1 | × | (추천) 아두이노 우노용 브레드보드 쉴드 | 쿠팡 | 아마존 | |
| 1 | × | (추천) 아두이노 우노용 케이스 | 쿠팡 | 아마존 | |
| 1 | × | (추천) 아두이노 우노용 프로토타이핑 베이스 플레이트 & 브레드보드 키트 | 아마존 |
공개: 이 포스팅 에 제공된 일부 링크는 아마존 제휴 링크입니다. 이 포스팅은 쿠팡 파트너스 활동의 일환으로, 이에 따른 일정액의 수수료를 제공받습니다.
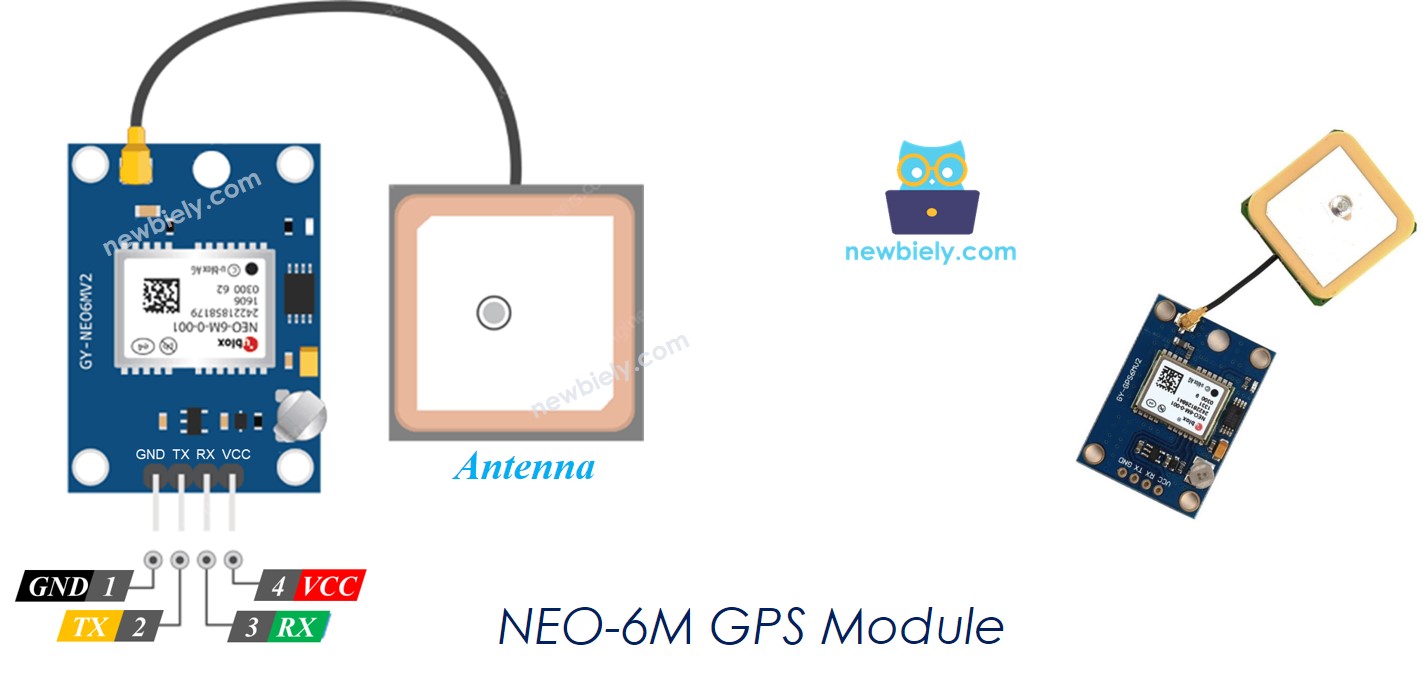
NEO-6M GPS 모듈에 관하여
핀배열
NEO-6M GPS 모듈에는 4개의 핀이 포함되어 있습니다:
- VCC 핀: VCC(5V)에 연결해야 합니다.
- GND 핀: GND(0V)에 연결해야 합니다.
- TX 핀: 직렬 통신에 사용되며, 아두이노의 Serial (또는 SoftwareSerial) RX 핀에 연결해야 합니다.
- RX 핀: 직렬 통신에 사용되며, 아두이노의 Serial (또는 SoftwareSerial) TX 핀에 연결해야 합니다.
선연결
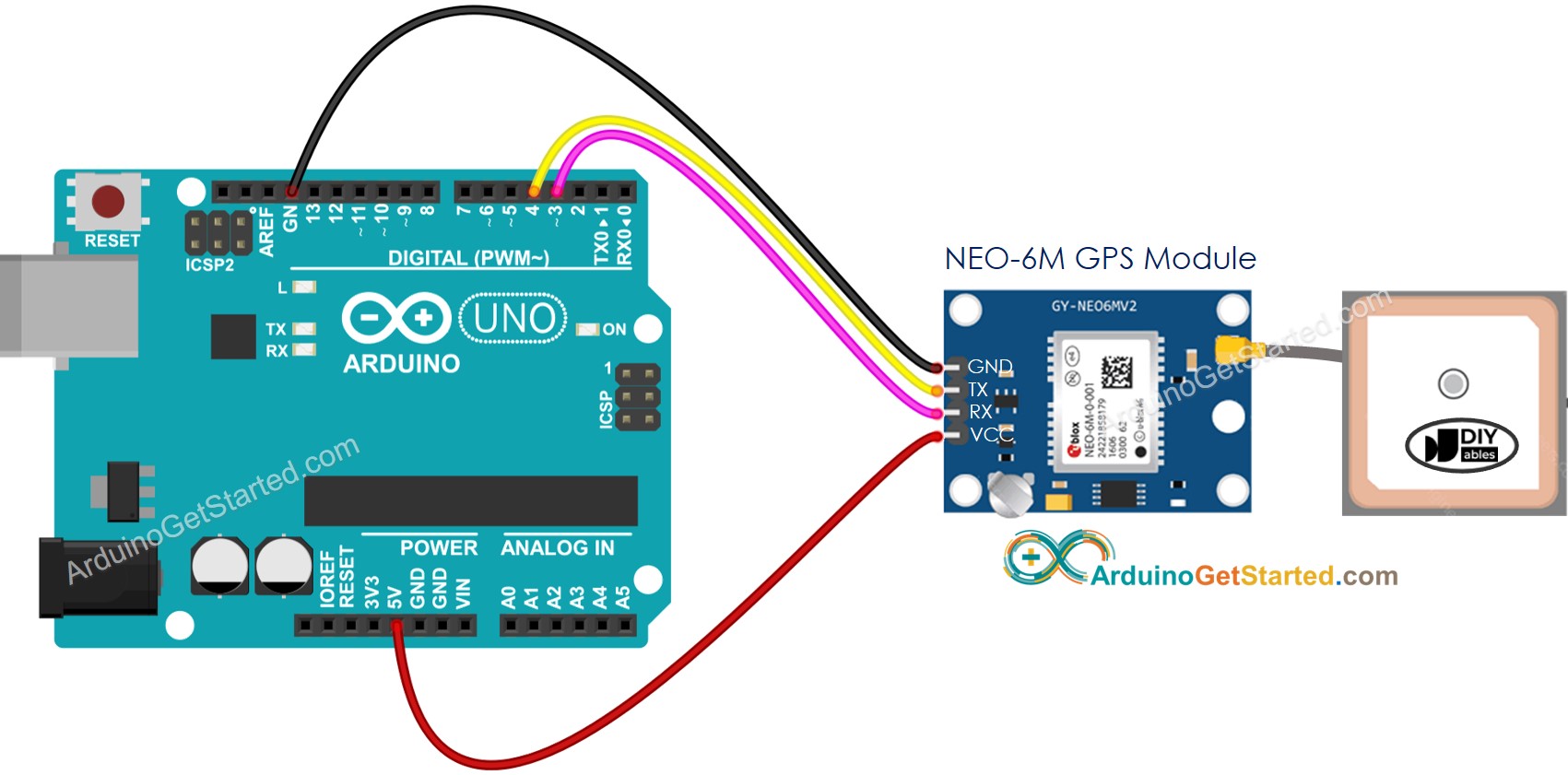
이 이미지는 Fritzing을 사용하여 만들어졌습니다. 이미지를 확대하려면 클릭하세요.
아두이노 코드
GPS 좌표, 속도(km/h), 그리고 날짜 시간 읽기
/*
* 이 아두이노 코드는 newbiely.kr 에서 개발되었습니다
* 이 아두이노 코드는 어떠한 제한 없이 공개 사용을 위해 제공됩니다.
* 상세한 지침 및 연결도에 대해서는 다음을 방문하세요:
* https://newbiely.kr/tutorials/arduino/arduino-gps
*/
#include <TinyGPS++.h>
#include <SoftwareSerial.h>
#define RX_PIN 4 // Arduino 핀이 GPS 모듈의 TX에 연결됨
#define TX_PIN 3 // Arduino 핀이 GPS 모듈의 RX에 연결됨
TinyGPSPlus gps; // TinyGPS++ 객체
SoftwareSerial gpsSerial(RX_PIN, TX_PIN); // GPS 모듈로의 직렬 인터페이스
void setup() {
Serial.begin(9600);
gpsSerial.begin(9600); // NEO-6M GPS 모듈의 기본 보드율은 9600임
Serial.println(F("Arduino - GPS 모듈"));
}
void loop() {
if (gpsSerial.available() > 0) {
if (gps.encode(gpsSerial.read())) {
if (gps.location.isValid()) {
Serial.print(F("- 위도: "));
Serial.println(gps.location.lat());
Serial.print(F("- 경도: "));
Serial.println(gps.location.lng());
Serial.print(F("- 고도: "));
if (gps.altitude.isValid())
Serial.println(gps.altitude.meters());
else
Serial.println(F("INVALID"));
} else {
Serial.println(F("- 위치: INVALID"));
}
Serial.print(F("- 속도: "));
if (gps.speed.isValid()) {
Serial.print(gps.speed.kmph());
Serial.println(F(" km/h"));
} else {
Serial.println(F("INVALID"));
}
Serial.print(F("- GPS 날짜&시각: "));
if (gps.date.isValid() && gps.time.isValid()) {
Serial.print(gps.date.year());
Serial.print(F("-"));
Serial.print(gps.date.month());
Serial.print(F("-"));
Serial.print(gps.date.day());
Serial.print(F(" "));
Serial.print(gps.time.hour());
Serial.print(F(":"));
Serial.print(gps.time.minute());
Serial.print(F(":"));
Serial.println(gps.time.second());
} else {
Serial.println(F("INVALID"));
}
Serial.println();
}
}
if (millis() > 5000 && gps.charsProcessed() < 10)
Serial.println(F("GPS 데이터 수신 안됨: 배선 확인"));
}
사용 방법
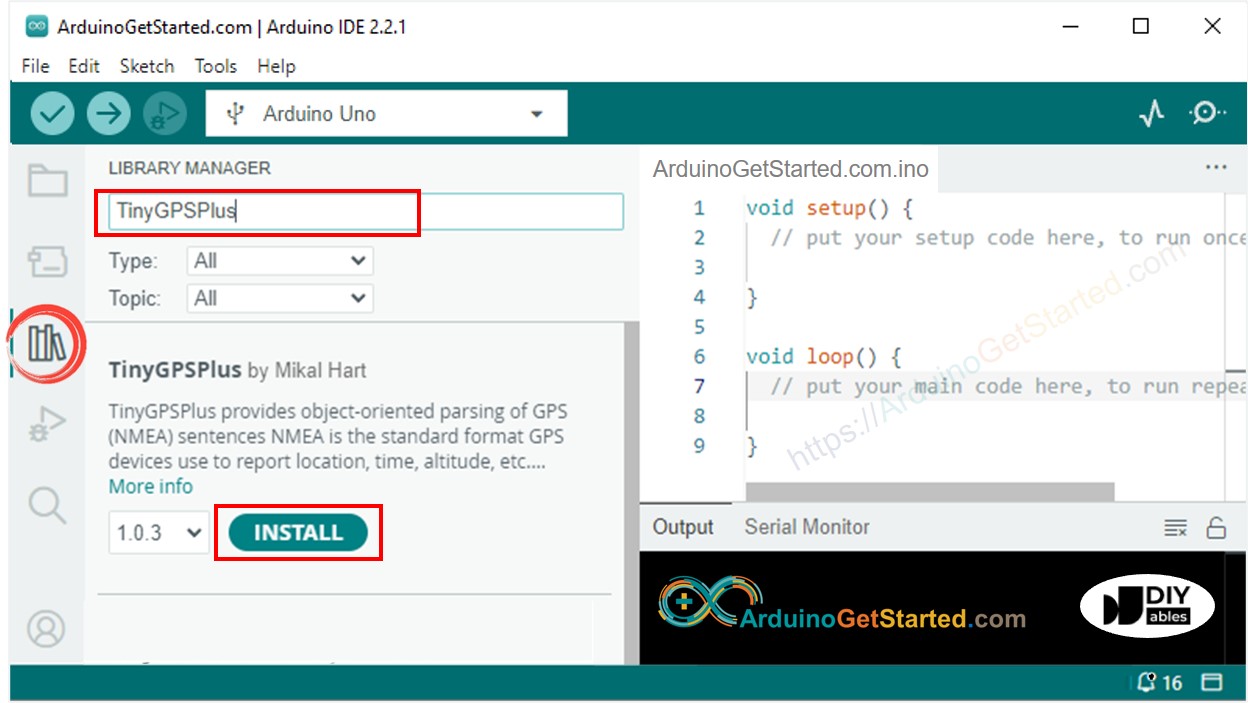
- Arduino IDE 열기
- Arduino IDE의 왼쪽 바에 있는 Libraries 아이콘으로 이동하십시오.
- "TinyGPSPlus"를 검색한 다음, Mikal Hart의 TinyGPSPlus 라이브러리를 찾으십시오.
- TinyGPSPlus 라이브러리를 설치하려면 Install 버튼을 클릭하십시오.
- 위의 코드를 복사하고 Arduino IDE로 열기
- Arduino IDE에서 Upload 버튼을 클릭하여 아두이노에 코드 업로드
- 시리얼 모니터에서 결과 확인:
8
Serial.println("Hello World!");
Message (Enter to send message to 'Arduino Uno' on 'COM15')
New Line
9600 baud
현재 위치에서 미리 정의된 위치까지의 거리 계산
아래 코드는 현재 위치와 런던(위도: 51.508131, 경도: -0.128002) 사이의 거리를 계산합니다.
/*
* 이 아두이노 코드는 newbiely.kr 에서 개발되었습니다
* 이 아두이노 코드는 어떠한 제한 없이 공개 사용을 위해 제공됩니다.
* 상세한 지침 및 연결도에 대해서는 다음을 방문하세요:
* https://newbiely.kr/tutorials/arduino/arduino-gps
*/
#include <TinyGPS++.h>
#include <SoftwareSerial.h>
#define RX_PIN 4 // Arduino 핀이 GPS 모듈의 TX에 연결됨
#define TX_PIN 3 // Arduino 핀이 GPS 모듈의 RX에 연결됨
TinyGPSPlus gps; // TinyGPS++ 객체
SoftwareSerial gpsSerial(RX_PIN, TX_PIN); // GPS 모듈로의 직렬 인터페이스
const double LONDON_LAT = 51.508131;
const double LONDON_LON = -0.128002;
void setup() {
Serial.begin(9600);
gpsSerial.begin(9600); // NEO-6M GPS 모듈의 기본 보드레이트는 9600입니다
Serial.println(F("Arduino - GPS module"));
}
void loop() {
if (gpsSerial.available() > 0) {
if (gps.encode(gpsSerial.read())) {
if (gps.location.isValid()) {
double latitude = gps.location.lat();
double longitude = gps.location.lng();
unsigned long distanceKm = TinyGPSPlus::distanceBetween(latitude, longitude, LONDON_LAT, LONDON_LON) / 1000;
Serial.print(F("- latitude: "));
Serial.println(latitude);
Serial.print(F("- longitude: "));
Serial.println(longitude);
Serial.print(F("- distance to London: "));
Serial.println(distanceKm);
} else {
Serial.println(F("- location: INVALID"));
}
Serial.println();
}
}
if (millis() > 5000 && gps.charsProcessed() < 10)
Serial.println(F("No GPS data received: check wiring"));
}
사용 방법
- 위의 코드를 복사하고 Arduino IDE로 열기
- 코드를 Arduino에 업로드하기 위해 Arduino IDE에서 Upload 버튼을 클릭하세요
- 시리얼 모니터에서 결과를 확인하세요:
8
Serial.println("Hello World!");
Message (Enter to send message to 'Arduino Uno' on 'COM15')
New Line
9600 baud
동영상
비디오 제작은 시간이 많이 걸리는 작업입니다. 비디오 튜토리얼이 학습에 도움이 되었다면, YouTube 채널 을 구독하여 알려 주시기 바랍니다. 비디오에 대한 높은 수요가 있다면, 비디오를 만들기 위해 노력하겠습니다.
WARNING
이 튜토리얼은 개발 중입니다.



