ESP32 웹을 통한 자동차 제어
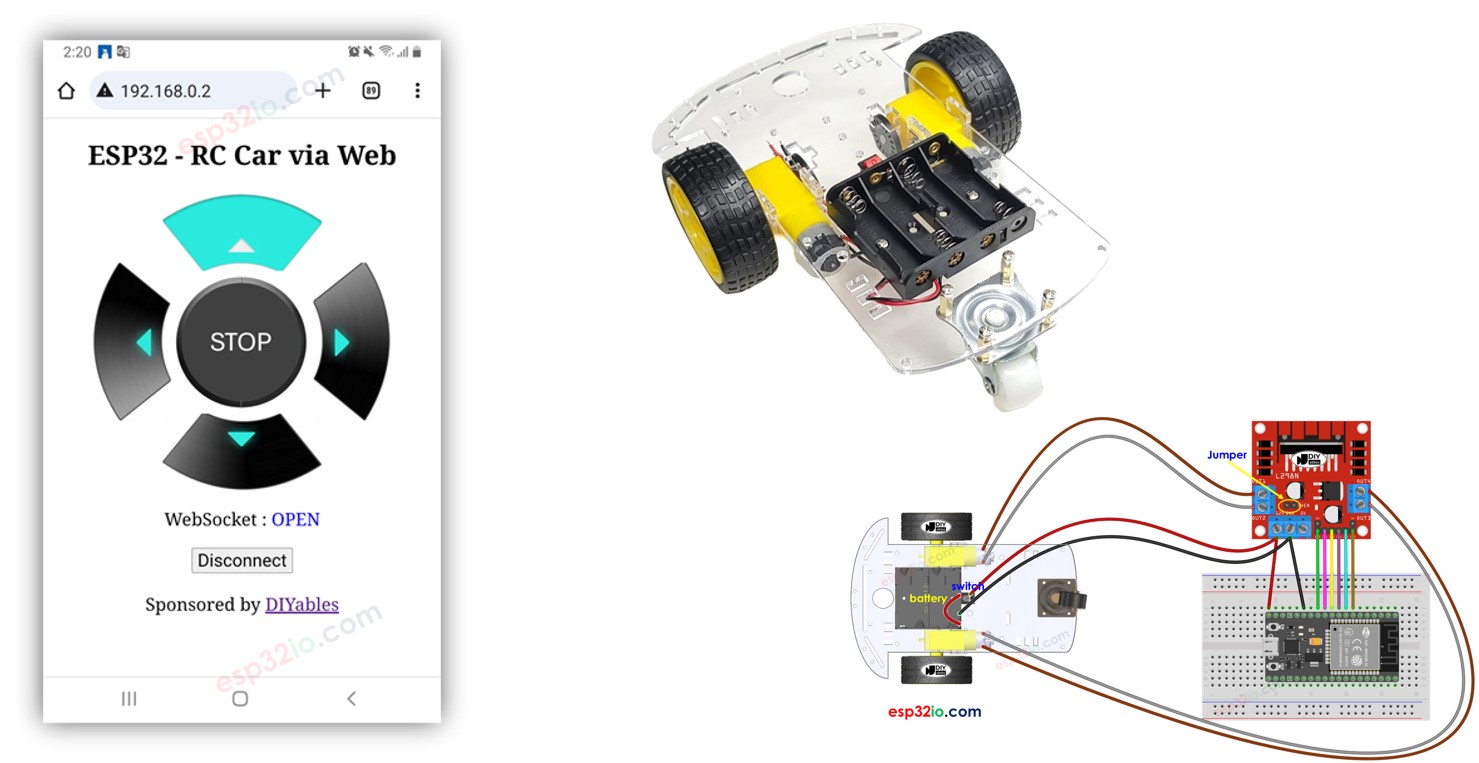
이 가이드는 ESP32를 사용하여 WiFi를 통해 스마트폰이나 PC의 웹 브라우저에서 로봇 차를 무선으로 제어하는 방법을 보여줍니다. 제어는 WebSocket이라는 것을 사용하는 그래픽 웹 사용자 인터페이스를 통해 이루어지며, 이를 통해 차량을 부드럽고 동적으로 제어할 수 있습니다.
1 × 38-pin ESP32 ESP-WROOM-32 Dev Module - Narrow 쿠팡 | 아마존 1 × (또는) 38-pin ESP32 ESP-WROOM-32 Dev Module - Wide 쿠팡 | 아마존 1 × (또는) 30-pin ESP32 ESP-WROOM-32 Dev Module - Wide 아마존 1 × (또는) ESP32 Uno-form board 아마존 1 × (또는) ESP32 S3 Uno-form board 아마존 1 × USB 케이블 타입-A to 타입-C (USB-A PC용) 쿠팡 | 아마존 1 × USB 케이블 타입-C to 타입-C (USB-C PC용) 아마존 1 × 2WD RC Car 쿠팡 | 아마존 1 × L298N 모터 드라이버 모듈 쿠팡 | 아마존 1 × IR 리모컨 키트 아마존 1 × CR2025 배터리 (IR 리모컨용) 아마존 1 × 1.5V AA Battery (for ESP32 and Car) 아마존 1 × 점퍼케이블 쿠팡 | 아마존 1 × 브레드보드 쿠팡 | 아마존 1 × (추천 ) ESP32용 스크루 터미널 확장 보드 쿠팡 | 아마존 1 × (추천 ) Breakout Expansion Board for ESP32 쿠팡 | 아마존 1 × (추천 ) ESP32용 전원 분배기 쿠팡 | 아마존
공개: 이 포스팅 에 제공된 일부 링크는 아마존 제휴 링크입니다. 이 포스팅은 쿠팡 파트너스 활동의 일환으로, 이에 따른 일정액의 수수료를 제공받습니다.
이제, 왜 WebSocket을 사용하나요? 여기 정보가 있습니다:
WebSocket 없이는 자동차의 방향을 변경할 때마다 페이지를 새로고침해야 합니다. 이상적이지 않죠!
하지만 WebSocket을 사용하면, 웹페이지와 ESP32 사이에 특별한 연결을 설정합니다. 이를 통해 페이지를 새로고침하지 않고도 배경에서 ESP32에 명령을 보낼 수 있습니다. 결과는? 로봇 자동차가 실시간으로 매끄럽게 움직입니다. 꽤 멋지지 않나요?
간단히 말해서, WebSocket 연결은 로봇의 원활하고 실시간 제어를 가능하게 합니다.
2WD RC 자동차와 WebSocket에 대한 구체적인 튜토리얼이 있습니다. 각 튜토리얼에는 하드웨어 핀아웃, 작동 원리, ESP32에 대한 배선 연결, ESP32 코드에 대한 자세한 정보와 단계별 지침이 포함되어 있습니다. 다음 링크에서 자세한 정보를 알아보세요:
ESP32 코드는 웹 서버와 WebSocket 서버를 모두 생성합니다. 다음은 그 작동 방식입니다:
웹 브라우저에 ESP32의 IP 주소를 입력하면, 웹 브라우저는 ESP32로부터 웹페이지(사용자 인터페이스)를 요청합니다.
ESP32의 웹 서버는 웹페이지 콘텐츠(HTML, CSS, JavaScript)를 보내는 것으로 응답합니다.
그러면 웹 브라우저는 웹페이지를 표시합니다.
웹페이지 내의 JavaScript 코드는 ESP32상의 WebSocket 서버에 WebSocket 연결을 설정합니다.
이 WebSocket 연결이 설정되면, 웹페이지의 버튼을 누르거나 놓으면 JavaScript 코드가 이 WebSocket 연결을 통해 명령을 ESP32 쪽으로 조용히 전송합니다.
ESP32상의 WebSocket 서버는 명령을 받고 나면, 그에 따라 로봇 자동차를 제어합니다.
아래 표는 사용자의 행동에 따라 웹페이지가 ESP32에 보내는 명령 목록을 보여줍니다:
User's Action Button Command Car Action PRESS UP 1 MOVE FORWARD PRESS DOWN 2 MOVE BACKWARD PRESS LEFT 4 TURN LEFT PRESS RIGHT 8 TURN RIGHT PRESS STOP 0 STOP RELEASE UP 0 STOP RELEASE DOWN 0 STOP RELEASE LEFT 0 STOP RELEASE RIGHT 0 STOP RELEASE STOP 0 STOP
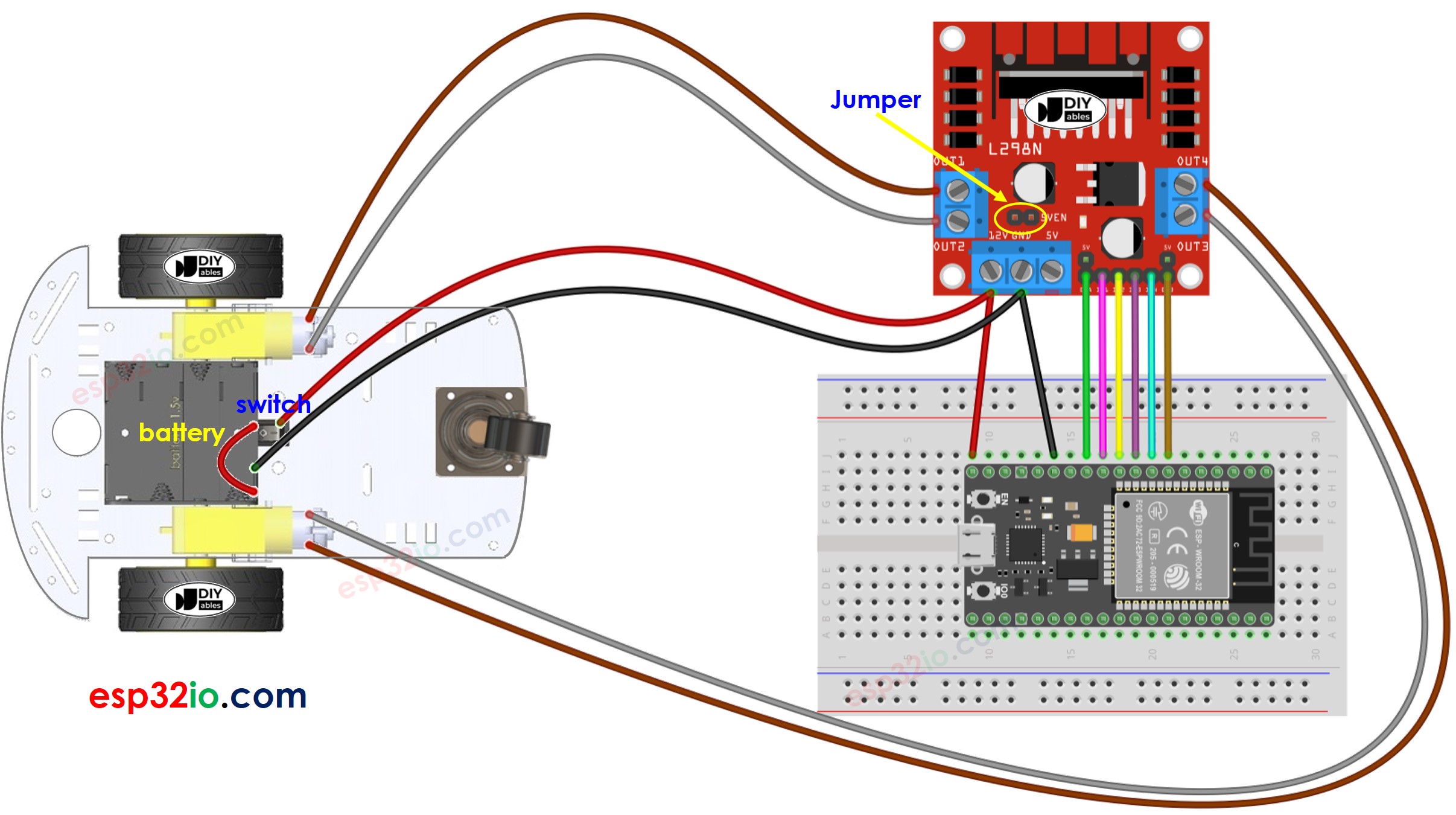
이 이미지는 Fritzing 을 사용하여 만들어졌습니다. 이미지를 확대하려면 클릭하세요.
ESP32 및 다른 구성 요소에 전원을 공급하는 방법에 대해 잘 알지 못하는 경우, 다음 튜토리얼에서 안내를 찾을 수 있습니다: ESP32 전원 공급 방법 .
일반적으로 두 개의 전원이 필요합니다:
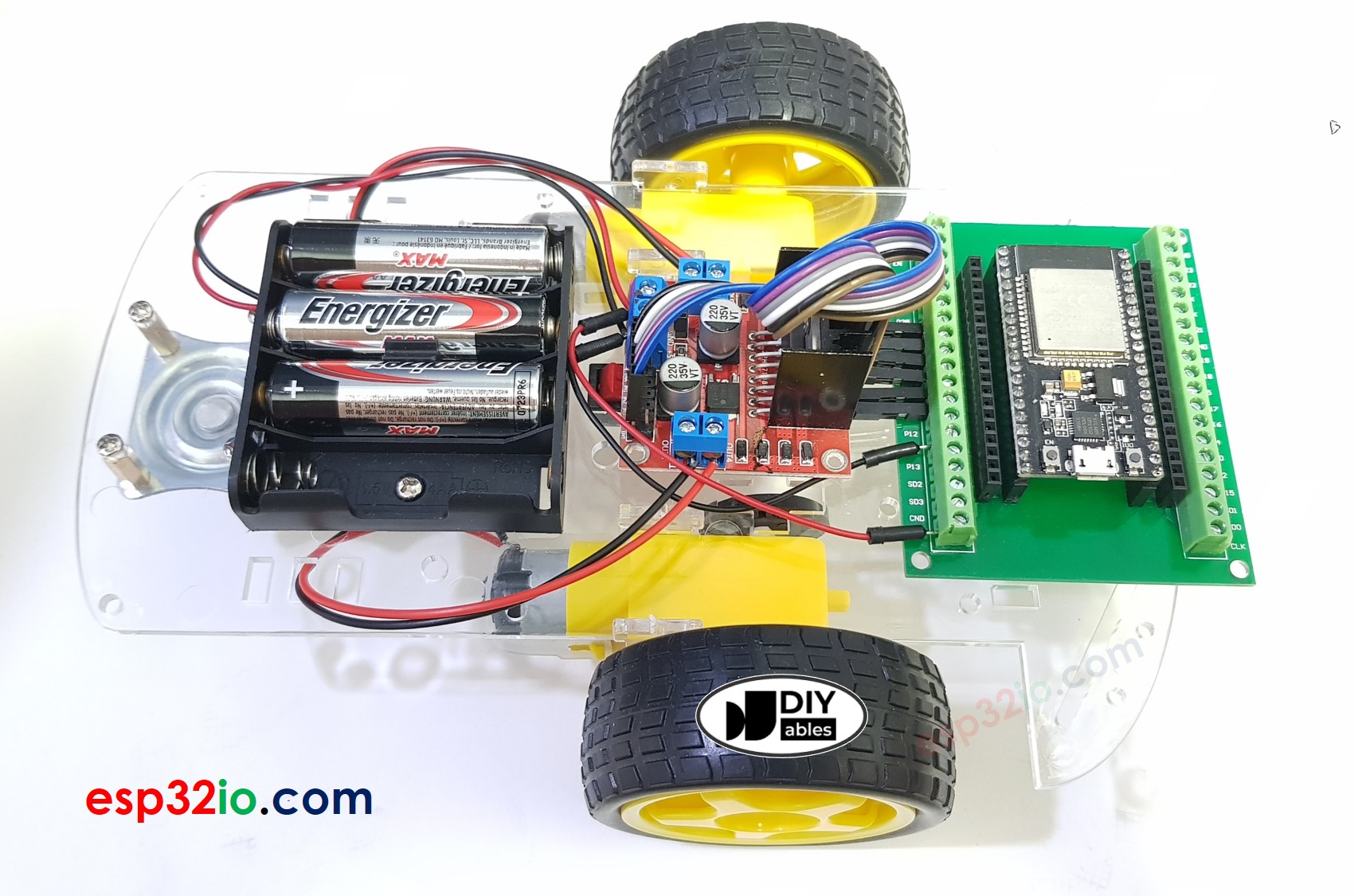
하지만 모든 것을 위해 단 하나의 전원원으로 단순화할 수 있습니다 - 1.5V 배터리 4개를 사용하여 총 6V입니다. 방법은 다음과 같습니다:
아래와 같이 배터리를 L298N 모듈에 연결하세요.
ENA와 ENB 핀에서 점퍼 두 개를 제거하고 L298N 모듈의 5볼트로 연결하세요.
5VEN이라고 표시된 점퍼(도표에 노란색 원으로 표시됨)를 추가하세요.
배터리에서 직접 전원을 공급하기 위해 L298N 모듈의 12V 핀을 ESP32의 Vin 핀에 연결하세요.
2WD RC 자동차에는 온/오프 스위치가 있어, 선택적으로 스위치를 통해 배터리를 연결하여 자동차의 전원을 켜고 끌 수 있습니다. 간단하게 하고 싶다면, 스위치는 무시하면 됩니다.
웹페이지의 콘텐츠(HTML, CSS, JavaScript)는 index.h 파일에 별도로 저장됩니다. 그래서 우리는 Arduino IDE에서 두 개의 코드 파일을 가질 것입니다:
위 이미지와 같이 배선하세요.
ESP32 보드를 마이크로 USB 케이블을 사용하여 PC에 연결하세요.
PC에서 Arduino IDE를 엽니다.
올바른 ESP32 보드(예: ESP32 Dev Module )와 COM 포트를 선택하세요.
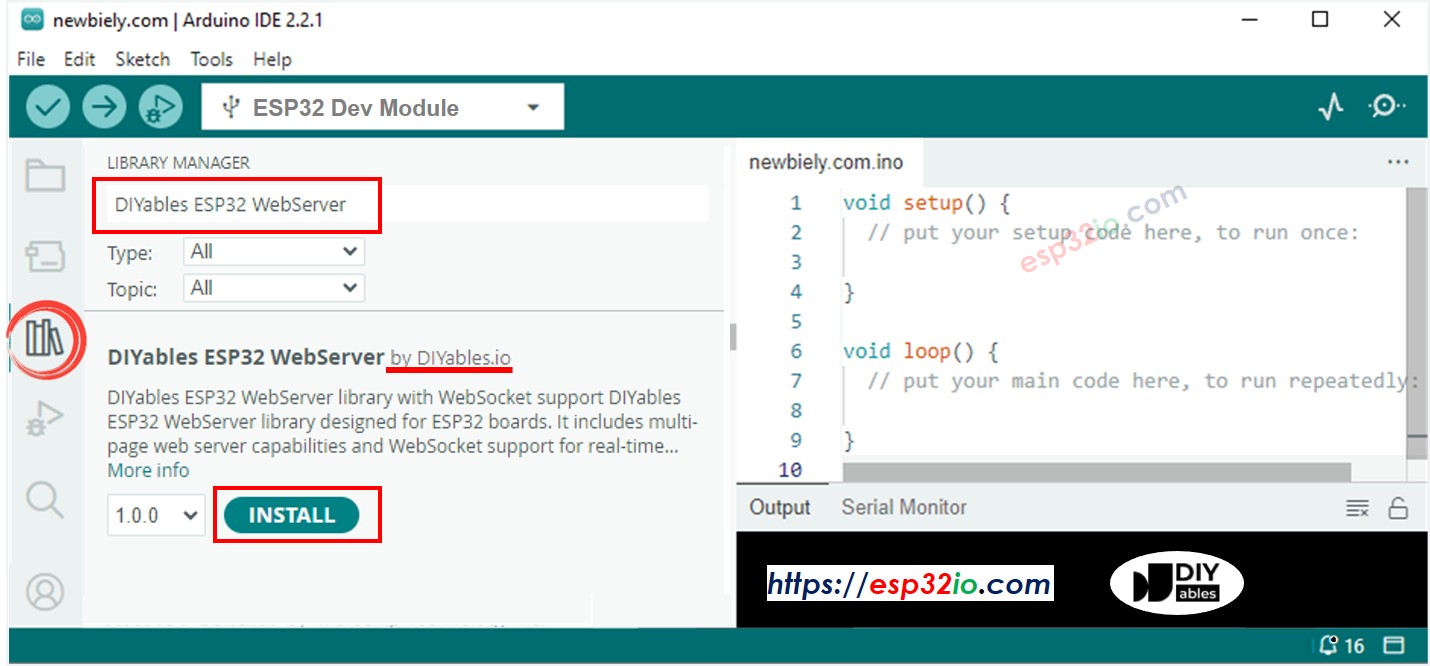
Arduino IDE의 왼쪽 탐색 바에 있는 Library Manager 아이콘을 클릭하여 라이브러리 관리자를 엽니다.
“DIYables ESP32 WebServer” 를 검색한 다음, DIYables가 만든 DIYables ESP32 WebServer를 찾으세요.
Install 버튼을 클릭하여 DIYables ESP32 WebServer 라이브러리를 설치하세요.
Arduino IDE에서 새 스케치를 생성하고 이름을 지정하세요. 예를 들어, newbiely.kr.ino
아래 코드를 복사하여 Arduino IDE로 열기
#include <DIYables_ESP32_WebServer .h>
#include "index.h"
#define CMD_STOP 0
#define CMD_FORWARD 1
#define CMD_BACKWARD 2
#define CMD_LEFT 4
#define CMD_RIGHT 8
#define ENA_PIN 14
#define IN1_PIN 27
#define IN2_PIN 26
#define IN3_PIN 25
#define IN4_PIN 33
#define ENB_PIN 32
const char WIFI_SSID[] = "YOUR_WIFI_SSID" ;const char WIFI_PASSWORD[] = "YOUR_WIFI_PASSWORD" ;DIYables_ESP32_WebServer server;DIYables_ESP32_WebSocket* webSocket;
void handleHome(WiFiClient& client, const String& method, const String& request, const QueryParams& params, const String& jsonData) { server.sendResponse (client, HTML_CONTENT);
}
void onWebSocketOpen(net::WebSocket& ws) { Serial .println ("New WebSocket connection" );
const char welcome[] = "Connected to ESP32 WebSocket Server!" ;
}
void onWebSocketMessage(net::WebSocket & ws, const net::WebSocket ::DataType dataType, const char* message, uint16_t length ) { String angle = String (message);
int command = angle.toInt ();
Serial .print ("command: " );
Serial .println (command );
switch (command ) {
case CMD_STOP:
Serial .println ("Stop" );
CAR_stop();
break ;
case CMD_FORWARD:
Serial .println ("Move Forward" );
CAR_moveForward();
break ;
case CMD_BACKWARD:
Serial .println ("Move Backward" );
CAR_moveBackward();
break ;
case CMD_LEFT:
Serial .println ("Turn Left" );
CAR_turnLeft();
break ;
case CMD_RIGHT:
Serial .println ("Turn Right" );
CAR_turnRight();
break ;
default :
Serial .println ("Unknown command" );
}
}
void onWebSocketClose(net::WebSocket & ws, const net::WebSocket ::CloseCode code, const char* reason, uint16_t length ) { Serial .println ("WebSocket client disconnected" );
}
void setup () { Serial .begin (9600);
delay (1000);
pinMode (ENA_PIN, OUTPUT );
pinMode (IN1_PIN, OUTPUT );
pinMode (IN2_PIN, OUTPUT );
pinMode (IN3_PIN, OUTPUT );
pinMode (IN4_PIN, OUTPUT );
pinMode (ENB_PIN, OUTPUT );
digitalWrite (ENA_PIN, HIGH );
digitalWrite (ENB_PIN, HIGH );
Serial .println ("ESP32 Web Server and WebSocket Server" );
server.addRoute ("/" , handleHome);
server.begin (WIFI_SSID, WIFI_PASSWORD);
webSocket = server.enableWebSocket (81);
if (webSocket != nullptr) {
webSocket->onOpen (onWebSocketOpen);
webSocket->onMessage (onWebSocketMessage);
webSocket->onClose (onWebSocketClose);
} else {
Serial .println ("Failed to start WebSocket server" );
}
}
void loop () {
server.handleClient ();
server.handleWebSocket ();
}
void CAR_moveForward() { digitalWrite (IN1_PIN, HIGH );
digitalWrite (IN2_PIN, LOW );
digitalWrite (IN3_PIN, HIGH );
digitalWrite (IN4_PIN, LOW );
}
void CAR_moveBackward() { digitalWrite (IN1_PIN, LOW );
digitalWrite (IN2_PIN, HIGH );
digitalWrite (IN3_PIN, LOW );
digitalWrite (IN4_PIN, HIGH );
}
void CAR_turnLeft() { digitalWrite (IN1_PIN, HIGH );
digitalWrite (IN2_PIN, LOW );
digitalWrite (IN3_PIN, LOW );
digitalWrite (IN4_PIN, LOW );
}
void CAR_turnRight() { digitalWrite (IN1_PIN, LOW );
digitalWrite (IN2_PIN, LOW );
digitalWrite (IN3_PIN, HIGH );
digitalWrite (IN4_PIN, LOW );
}
void CAR_stop() { digitalWrite (IN1_PIN, LOW );
digitalWrite (IN2_PIN, LOW );
digitalWrite (IN3_PIN, LOW );
digitalWrite (IN4_PIN, LOW );
}
코드 내의 WiFi 정보(SSID 및 비밀번호)를 자신의 네트워크 자격 증명과 일치하도록 수정하세요.
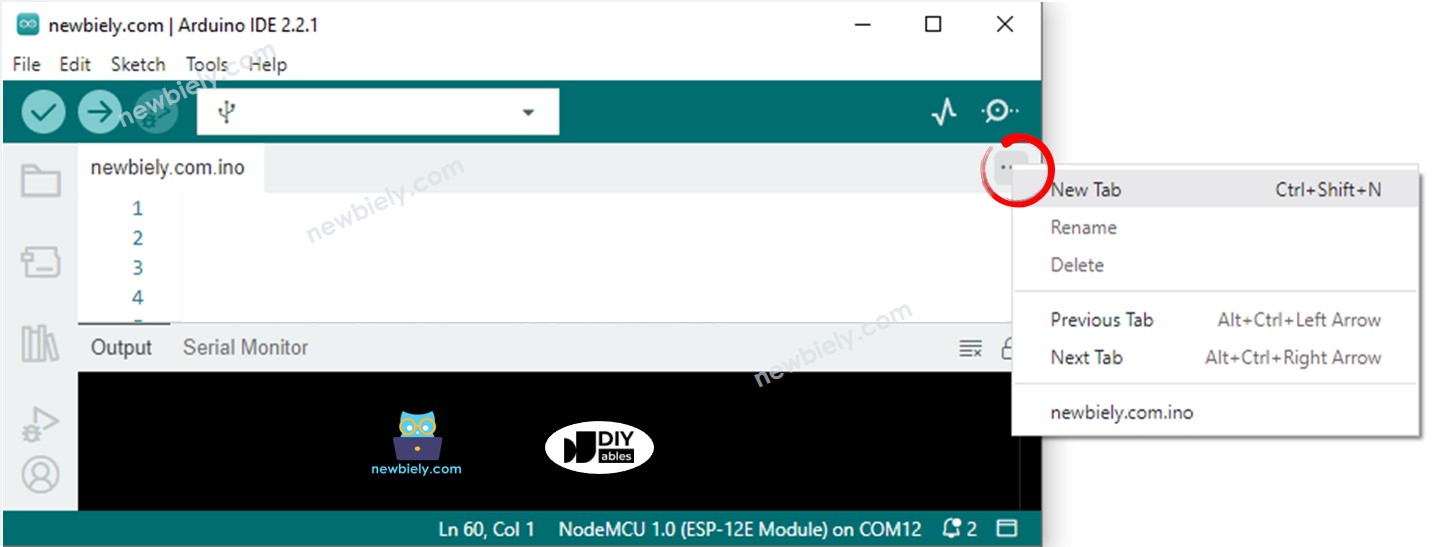
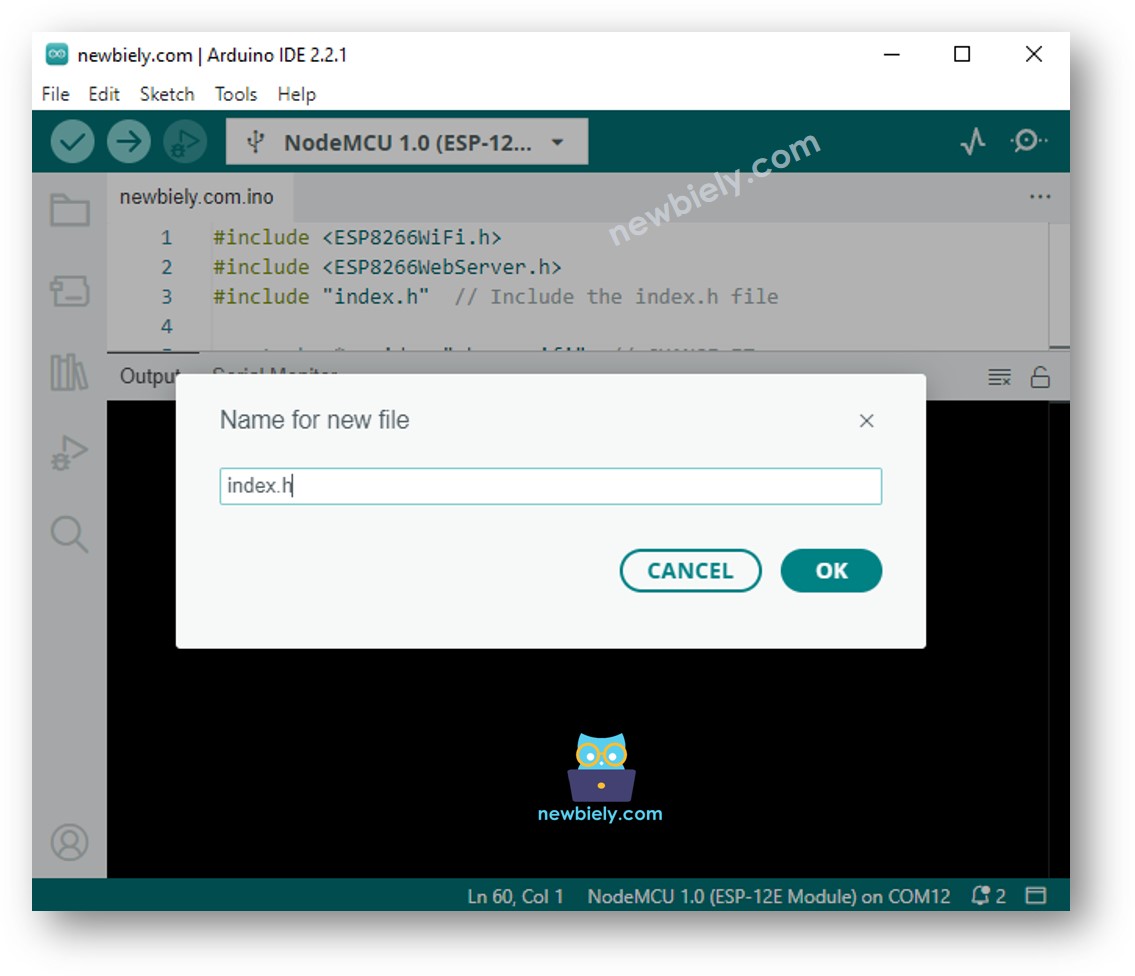
Arduino IDE에서 index.h 파일을 만드는 방법:
파일 이름을 index.h 로 지정하고 OK 버튼을 클릭하세요.
아래 코드를 복사하여 index.h에 붙여넣으세요.
const char *HTML_CONTENT = R"=====(
<!DOCTYPE html>
<html>
<head>
<title>ESP32 Control Car via Web</title>
<meta name=" viewport" content=" width=device-width, initial-scale=0.7, maximum-scale=1, user-scalable=no">
<style type=" text/css">body { text-align: center; font-size: 24px;}
button { text-align: center; font-size: 24px;}
#container {
margin-right: auto;
margin-left: auto;
width: 400px;
height: 400px;
position: relative;
margin-bottom: 10px;
}
div[class ^='button' ] { position : absolute; }
.button_up, .button_down { width:214px; height:104px;}
.button_left, .button_right { width:104px; height:214px;}
.button_stop { width:178px; height:178px;}
.button_up {
background: url('https://esp32io.com/images/tutorial/up_inactive.png' ) no-repeat;
background-size: contain;
left: 200px;
top: 0px;
transform : translateX(-50%);
}
.button_down {
background: url('https://esp32io.com/images/tutorial/down_inactive.png' ) no-repeat;
background-size: contain;
left:200px;
bottom: 0px;
transform : translateX(-50%);
}
.button_right {
background: url('https://esp32io.com/images/tutorial/right_inactive.png' ) no-repeat;
background-size: contain;
right: 0px;
top: 200px;
transform : translateY(-50%);
}
.button_left {
background: url('https://esp32io.com/images/tutorial/left_inactive.png' ) no-repeat;
background-size: contain;
left:0px;
top: 200px;
transform : translateY(-50%);
}
.button_stop {
background: url('https://esp32io.com/images/tutorial/stop_inactive.png' ) no-repeat;
background-size: contain;
left:200px;
top: 200px;
transform : translate(-50%, -50%);
}
</style>
<script>
var CMD_STOP = 0;
var CMD_FORWARD = 1;
var CMD_BACKWARD = 2;
var CMD_LEFT = 4;
var CMD_RIGHT = 8;
var img_name_lookup = {
[CMD_STOP]: "stop" ,
[CMD_FORWARD]: "up" ,
[CMD_BACKWARD]: "down" ,
[CMD_LEFT]: "left" ,
[CMD_RIGHT]: "right"
}
var ws = null ;
function init ()
{
var container = document.querySelector("#container" );
container.addEventListener ("touchstart" , mouse_down);
container.addEventListener ("touchend" , mouse_up);
container.addEventListener ("touchcancel" , mouse_up);
container.addEventListener ("mousedown" , mouse_down);
container.addEventListener ("mouseup" , mouse_up);
container.addEventListener ("mouseout" , mouse_up);
}
function ws_onmessage(e_msg)
{
e_msg = e_msg || window.event;
}
function ws_onopen()
{
document.getElementById("ws_state" ).innerHTML = "OPEN" ;
document.getElementById("wc_conn" ).innerHTML = "Disconnect" ;
}
function ws_onclose()
{
document.getElementById("ws_state" ).innerHTML = "CLOSED" ;
document.getElementById("wc_conn" ).innerHTML = "Connect" ;
console.log ("socket was closed" );
ws.onopen = null;
ws.onclose = null;
ws.onmessage = null;
ws = null;
}
function wc_onclick()
{
if(ws == null)
{
ws = new WebSocket("ws:
document.getElementById("ws_state" ).innerHTML = "CONNECTING" ;
ws.onopen = ws_onopen;
ws.onclose = ws_onclose;
ws.onmessage = ws_onmessage;
}
else
ws.close();
}
function mouse_down(event)
{
if (event.target !== event.currentTarget)
{
var id = event.target.id;
send_command(id);
event.target.style.backgroundImage = "url('https://esp32io.com/images/tutorial/" + img_name_lookup[id] + "_active.png' )";
}
event.stopPropagation();
event.preventDefault();
}
function mouse_up(event)
{
if (event.target !== event.currentTarget)
{
var id = event.target.id;
send_command(CMD_STOP);
event.target.style.backgroundImage = " url('https://esp32io.com/images/tutorial/" + img_name_lookup[id] + "_inactive.png' )";
}
event.stopPropagation();
event.preventDefault();
}
function send_command(cmd)
{
if(ws != null)
if(ws.readyState == 1)
ws.send(cmd + " \r\n");
}
window.onload = init;
</script>
</head>
<body>
<h2>ESP32 - RC Car via Web</h2>
<div id=" container">
<div id=" 0" class =" button_stop"></div>
<div id=" 1" class =" button_up"></div>
<div id=" 2" class =" button_down"></div>
<div id=" 8" class =" button_right"></div>
<div id=" 4" class =" button_left"></div>
</div>
<p>
WebSocket : <span id=" ws_state" style=" color:blue">closed</span><br>
</p>
<button id=" wc_conn" type=" button " onclick=" wc_onclick();">Connect</button>
<br>
<br>
<div class =" sponsor">Sponsored by <a href=" https://amazon.com/diyables">DIYables</a></div>
</body>
</html>
)=====" ;
∞
Newbiely | Arduino IDE 2.3.8
8
Serial .println ("Hello World!" );
Message (Enter to send message to 'ESP32 Dev Module' on 'COM15')
Connecting to WiFi...
Connected to WiFi
ESP32 Web Server's IP address IP address: 192.168.0.2
Ln 11, Col 1
ESP32 Dev Module on COM15
2
웹페이지의 JavaScript 코드가 자동으로 ESP32와의 WebSocket 연결을 생성합니다.
이제 웹 인터페이스를 통해 차를 좌/우로 회전시키거나 앞/뒤로 이동시킬 수 있습니다.
ESP32의 메모리를 절약하기 위해, 컨트롤 버튼의 이미지는 ESP32에 저장되지 않습니다. 대신, 인터넷에 저장되어 있으므로, 웹 제어 페이지의 이미지를 불러오기 위해 휴대폰이나 PC가 인터넷 연결이 필요합니다.
※ 주의:
index.h 의 HTML 내용을 수정하고 newbiely.kr.ino 파일은 건드리지 않으면, ESP32에 코드를 컴파일하고 업로드할 때 Arduino IDE가 HTML 내용을 업데이트하지 않습니다.
이 경우 Arduino IDE가 HTML 내용을 업데이트하게 하려면, newbiely.kr.ino 파일에 변경 사항을 만들어야 합니다(예: 빈 줄 추가, 주석 추가....).
위의 ESP32 코드에는 줄마다 설명이 포함되어 있습니다. 코드의 주석을 읽어주세요!