ESP32 DC 모터
이 튜토리얼은 ESP32를 사용하여 L298N 모터 드라이버를 사용해 DC 모터를 제어하는 방법을 안내합니다. 구체적으로, 우리는 DC 모터의 속도와 방향을 제어하는 방법을 배울 것입니다. 우리는 단일 DC 모터를 제어하는 방법과 그 다음에 L298N 모터 드라이버 하나를 사용하여 두 개의 DC 모터를 제어하는 방법을 배울 것입니다.
준비물
| 1 | × | 38-pin ESP32 ESP-WROOM-32 Dev Module - Narrow | 쿠팡 | 아마존 | |
| 1 | × | (또는) 38-pin ESP32 ESP-WROOM-32 Dev Module - Wide | 쿠팡 | 아마존 | |
| 1 | × | (또는) 30-pin ESP32 ESP-WROOM-32 Dev Module - Wide | 아마존 | |
| 1 | × | (또는) ESP32 Uno-form board | 아마존 | |
| 1 | × | (또는) ESP32 S3 Uno-form board | 아마존 | |
| 1 | × | USB 케이블 타입-A to 타입-C (USB-A PC용) | 쿠팡 | 아마존 | |
| 1 | × | USB 케이블 타입-C to 타입-C (USB-C PC용) | 아마존 | |
| 1 | × | L298N 모터 드라이버 모듈 | 쿠팡 | 아마존 | |
| 1 | × | 5V DC 모터 | 아마존 | |
| 1 | × | 5V DC 모터용 전원 어댑터 | 아마존 | |
| 1 | × | 브레드보드 | 쿠팡 | 아마존 | |
| 1 | × | 점퍼케이블 | 쿠팡 | 아마존 | |
| 1 | × | (옵션) DC 커넥터 전원 연결 잭 플러그 소켓 | 쿠팡 | 아마존 | |
| 1 | × | (추천) ESP32용 스크루 터미널 확장 보드 | 쿠팡 | 아마존 | |
| 1 | × | (추천) Breakout Expansion Board for ESP32 | 쿠팡 | 아마존 | |
| 1 | × | (추천) ESP32용 전원 분배기 | 쿠팡 | 아마존 |
DC 모터에 대하여
DC 모터 핀배열
DC 모터는 두 개의 전선을 포함합니다: 음성(검정), 그리고 양성(빨강)

직류 모터가 어떻게 작동하는가
DC 모터의 방향과 속도는 우리가 전력을 공급하는 방식에 따라 결정됩니다. 아래 이미지는 전력과 속도/방향 사이의 자세한 관계를 보여줍니다.
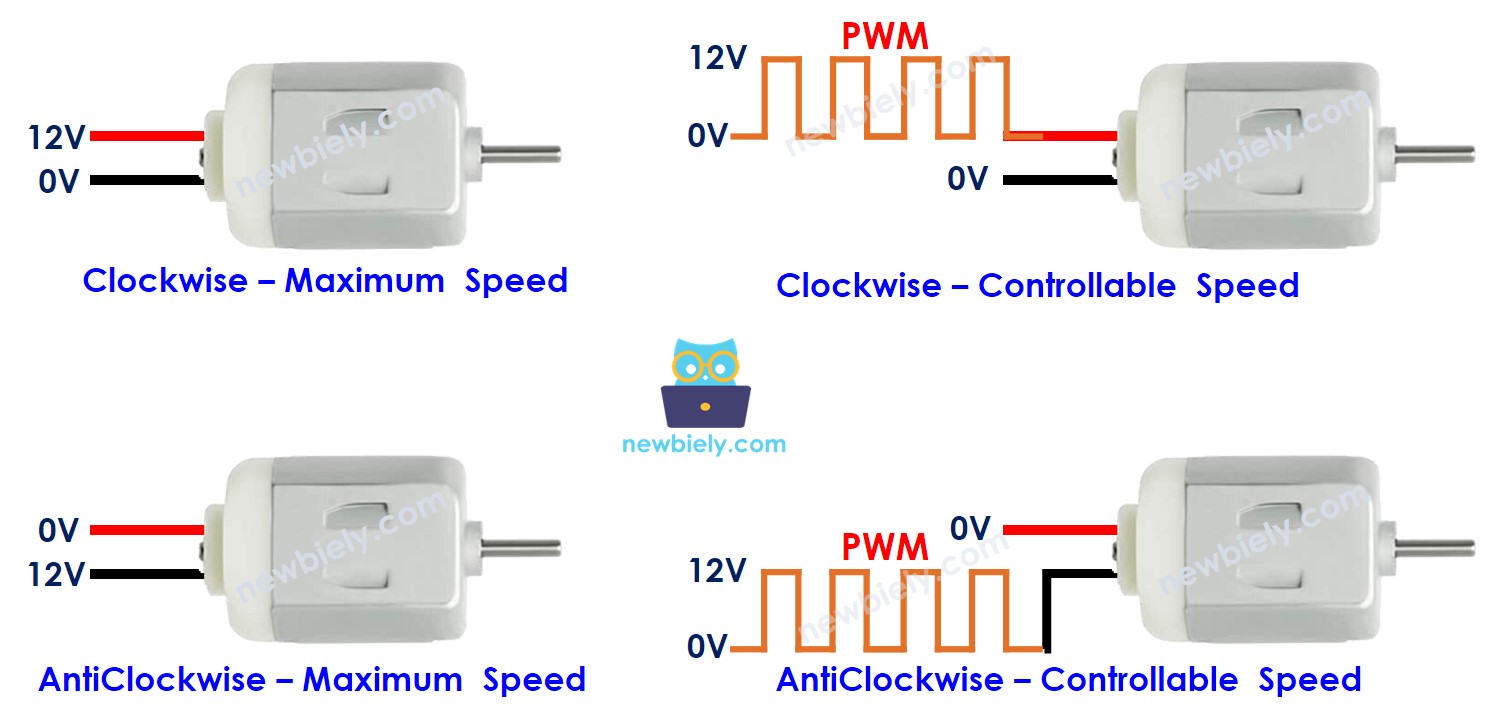
PWM을 사용하는 경우에는 듀티 사이클이 클수록 모터의 회전 속도가 빨라집니다.
다음 애니메이션은 PWM 신호가 DC 모터의 속도를 제어하는 방법을 보여줍니다:
ESP32를 사용하여 DC 모터의 속도 및 방향을 제어하는 방법
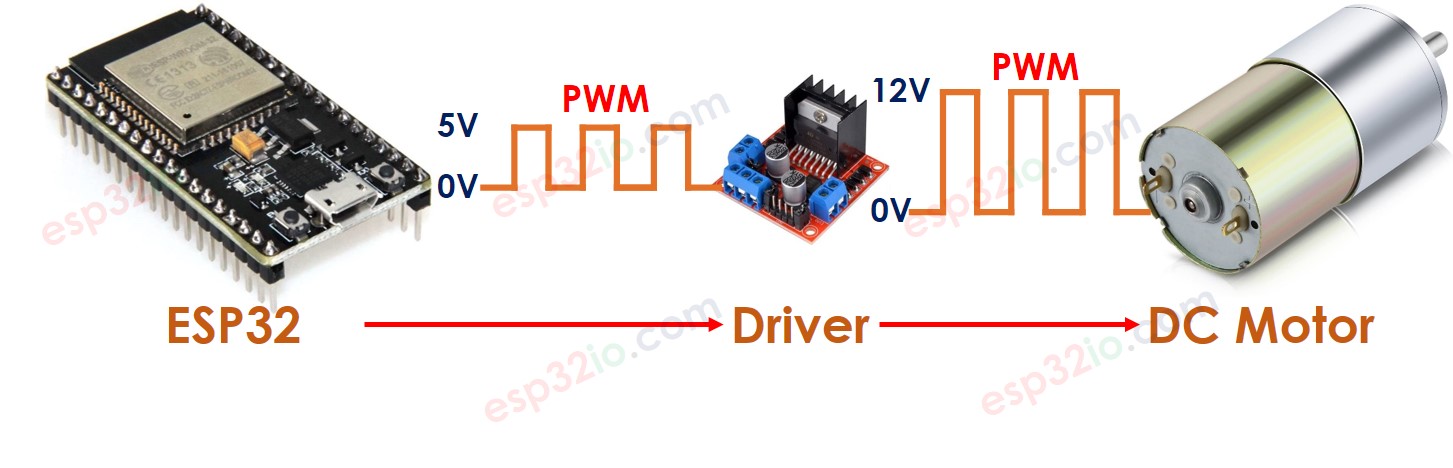
첫째로, DC 모터는 ESP32를 태울 수 있는 고전압으로 작동합니다 ⇒ 우리는 DC 모터를 ESP32에 직접 연결할 수 없습니다. DC 모터와 ESP32 사이에 하드웨어 드라이버가 필요합니다. 드라이버는 세 가지 책임을 집니다:
- ESP32를 고전압으로부터 보호하기
- 전원 공급 장치의 극성을 변경하여 모터의 방향을 제어하기 위해 ESP32에서 신호를 수신하기
- 모터의 속도를 제어하기 위해 ESP32에서 온 PWM 신호(전류 및 전압)를 증폭하기
DC 모터 드라이버가 많이 있습니다. 이 튜토리얼에서는 L298N 드라이버를 사용할 것입니다.
L298N 드라이버 정보
L298N 드라이버 하나로 두 개의 DC 모터나 스테퍼 모터를 제어할 수 있습니다. 이 튜토리얼에서는 이 드라이버를 사용하여 DC 모터를 제어합니다.
L298N 드라이버 핀배열
아래 이미지는 L298N 드라이버의 핀배열을 보여줍니다.
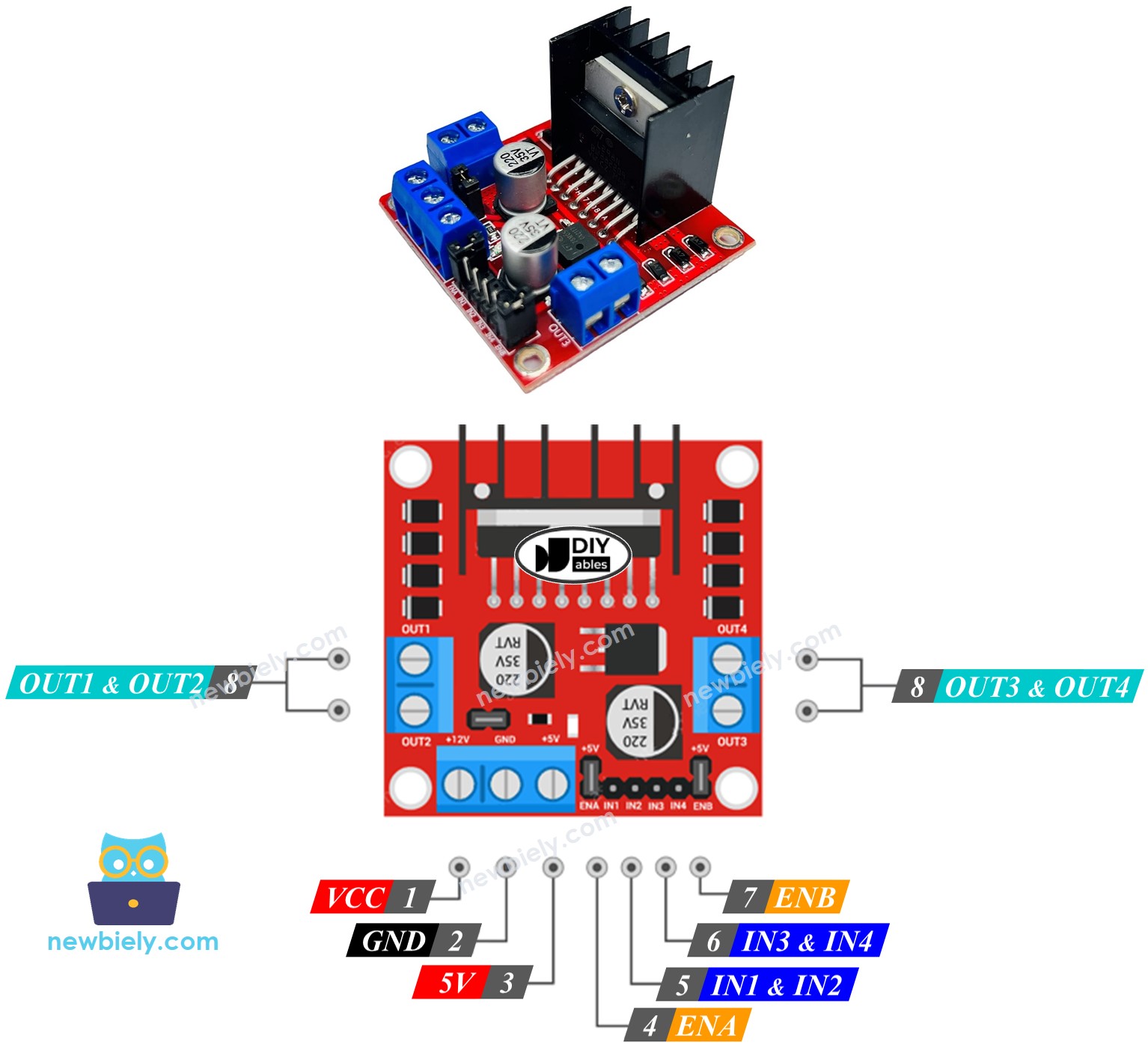
각 핀에 대한 자세한 설명은 이 Arduino - DC 모터 튜토리얼에서 확인할 수 있습니다.
단일 L298N 드라이버는 두 개의 DC 모터를 독립적으로 제어할 수 있습니다.
- 첫 번째 모터(모터 A라고 함)는 IN1, IN2, ENA, OUT1, OUT2 핀으로 제어됩니다.
- 두 번째 모터(모터 B라고 함)는 IN3, IN4, ENB, OUT3, OUT4 핀으로 제어됩니다.
DC 모터의 속도를 L298N 드라이버로 제어하는 방법
DC 모터의 속도를 L298N의 ENA/ENB 핀에 PWM 신호를 생성함으로써 간단히 제어할 수 있습니다. 우리는 다음과 같이 이것을 수행할 수 있습니다:
- ESP32의 디지털 출력 핀을 L298N의 ENA/ENB 핀에 연결하기
- analogWrite() 함수를 사용하여 ENA/ENB 핀에 PWM 신호 생성하기. 이 PWM 신호는 L298N 드라이버를 통과하여 DC 모터로 가기 전에 전류와 전압을 증폭합니다.
속도는 0에서 255 사이의 값입니다. 만약 그것이 255라면, 모터는 최대 속도로 돌아갑니다. 만약 그것이 0이라면, 모터는 멈춥니다.
L298N 드라이버를 통한 DC 모터의 방향 제어 방법
DC 모터 A의 방향은 IN1과 IN2 핀으로 제어할 수 있습니다. 다음 표는 모터의 방향과 IN1 및 IN2 핀의 신호 사이의 관계를 보여줍니다.
| IN1 pin | IN2 pin | Direction |
|---|---|---|
| HIGH | LOW | DC Motor A rotates in clockwise direction |
| LOW | HIGH | DC Motor A rotates in anticlockwise direction |
| HIGH | HIGH | DC Motor A stops |
| LOW | LOW | DC Motor A stops |
마찬가지로 아래 표는 DC 모터 B용입니다.
| IN3 pin | IN4 pin | Direction |
|---|---|---|
| HIGH | LOW | DC Motor B rotates in clockwise direction |
| LOW | HIGH | DC Motor B rotates in anticlockwise direction |
| HIGH | HIGH | DC Motor B stops |
| LOW | LOW | DC Motor B stops |
그것을 제어하기 위해 프로그래밍하는 방법을 배워봅시다. 예를 들어 모터 A를 사용해보겠습니다. 모터 B도 비슷합니다.
모터 A의 방향을 시계 방향으로 제어하기
모터 A의 방향을 반시계 방향으로 제어하기
※ 주의:
DC 모터와 L298N 드라이버 사이의 배선이 역순이면 DC 모터의 방향이 반대가 됩니다. 그런 경우에는 OUT1과 OUT2 핀의 위치를 바꾸세요.
DC 모터를 멈추는 방법
DC 모터를 멈추는 두 가지 방법이 있습니다.
속도를 0으로 제어하기
IN1 IN2 핀을 동일하게 LOW 또는 HIGH로 제어하기
"또는"
L298N 드라이버를 사용하여 DC 모터를 제어하는 방법.
배선도
L298N 모듈에 점퍼가 세 개 있습니다. 배선 작업을 하기 전에 모두 제거하세요.
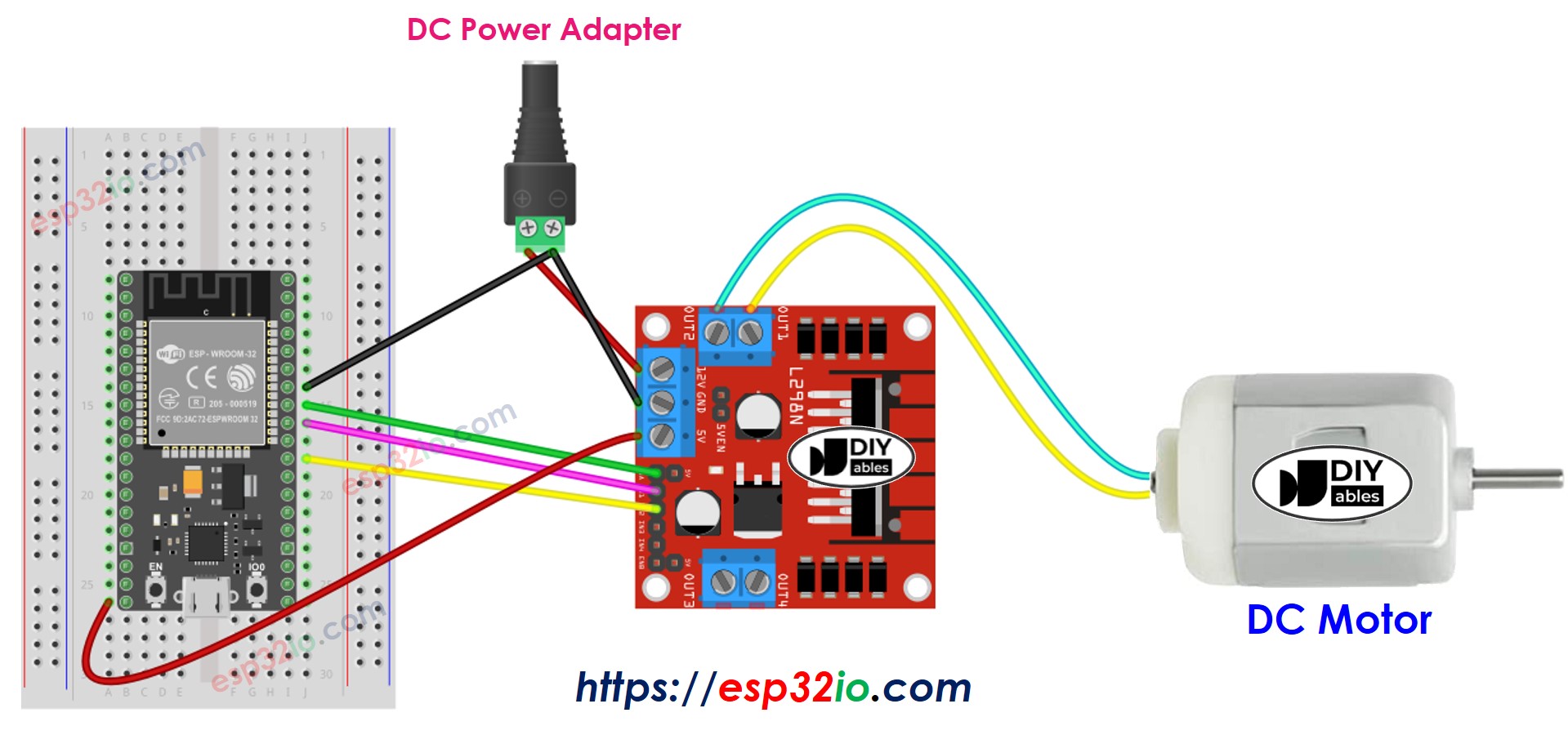
이 이미지는 Fritzing을 사용하여 만들어졌습니다. 이미지를 확대하려면 클릭하세요.
ESP32 및 다른 구성 요소에 전원을 공급하는 방법에 대해 잘 알지 못하는 경우, 다음 튜토리얼에서 안내를 찾을 수 있습니다: ESP32 전원 공급 방법.
ESP32 코드
아래 코드를 보겠습니다. 이 코드는 다음과 같은 일들을 차례로 수행합니다:
- ESP32는 DC 모터의 속도를 점차적으로 증가시킵니다.
- ESP32는 DC 모터의 방향을 반전시킵니다.
- ESP32는 DC 모터의 속도를 점차적으로 감소시킵니다.
- ESP32는 DC 모터를 정지시킵니다.
사용 방법
- ESP32를 처음 사용하는 경우, ESP32 - 소프트웨어 설치을 참조하세요.
- L298N 모듈의 모든 점퍼를 제거하세요.
- 위의 코드를 복사하여 Arduino IDE에 붙여넣으세요.
- Arduino IDE에서 Upload 버튼을 클릭하여 코드를 ESP32 보드에 컴파일하고 업로드하세요.
- DC 모터를 관찰하세요, 다음을 볼 수 있습니다:
- DC 모터가 가속되어 2초 동안 최대 속도로 회전합니다
- DC 모터의 방향이 반전됩니다
- DC 모터가 2초 동안 반대 방향으로 최대 속도로 회전합니다
- DC 모터가 감속됩니다
- DC 모터가 2초 동안 정지합니다
- 위 과정은 무한히 반복됩니다.
※ 주의:
이 튜토리얼은 DC 모터 속도를 상대적으로 제어하는 방법을 지시합니다. 절대 속도(초당 회전 수)를 제어하려면 PID 컨트롤러와 인코더의 피드백을 사용해야 합니다.
L298N 드라이버를 사용하여 두 개의 DC 모터를 제어하는 방법
(곧 출시됩니다)
동영상
비디오 제작은 시간이 많이 걸리는 작업입니다. 비디오 튜토리얼이 학습에 도움이 되었다면, YouTube 채널 을 구독하여 알려 주시기 바랍니다. 비디오에 대한 높은 수요가 있다면, 비디오를 만들기 위해 노력하겠습니다.



